3D CNN驱动的无人机场景探索:预测视图效用
97 浏览量
更新于2024-06-20
收藏 2.78MB PDF 举报
"预测视图实用程序:基于3D CNN的无人机场景探索"
本文探讨了在无人机场景探索和3D重建中使用机器学习,特别是3D卷积神经网络(3D CNNs)来优化探索效率的方法。传统的无人机探索策略通常依赖于人工设计的实用程序函数来预测新视角的价值,但这种方法可能无法充分捕捉复杂场景的几何特性。作者提出了一种新的学习方法,利用3D CNN来学习预测未来视点的有用性的效用函数。
1. **3D重建和无人机探索**
在无人机探索和3D重建任务中,无人机需生成详细的地图,识别出哪些区域是自由的、被占用的或未知的,以便安全导航并实现特定目标,如覆盖3D表面。现有技术分为基于模型和无模型两类,前者依赖于预先获取的自由空间信息,限制了其在未知环境中的应用,而后者则适用于未知环境。
2. **3D CNNs在视图选择中的应用**
本文的核心创新在于使用3D CNN学习预测视图的效用函数。这种网络能够处理新的场景表示,结合了先前访问的观点,从而对未知环境进行概括。相较于人工设计的启发式算法,这种方法能更灵活地捕获3D几何形状的复杂性和多样性。
3. **学习策略**
效用函数的学习过程是通过一个能够访问实际数据的oracle进行的,它能提供预期的目标值。这使得网络能够根据实际观测到的信息来改进其预测,从而提高规划器在选择探索路径时的效率。
4. **评估与比较**
研究人员在多个大型城市3D模型上评估了这种方法,使用模拟的深度相机进行实验。实验结果表明,他们的方法在重建性能上优于传统的实用程序措施,即使在存在传感器噪声的情况下也能保持高效。
5. **关键词**
本文涉及的关键技术包括3D重建、探索策略、主动视觉以及3D CNN的应用。这些关键词揭示了研究的核心内容,即如何利用深度学习技术改进无人机在未知环境中的探索能力。
6. **贡献与影响**
这项工作不仅提出了一个数据驱动的、基于3D CNN的视图选择方法,还为未来的无人机探索和3D重建任务提供了新的工具和思路。这种方法有可能推动无人机在搜索、救援、环境监测等领域的应用,实现更高效、自主的探索。
通过这种方法,无人机可以更加智能地规划其路径,有效地探索未知场景,提高3D重建的质量,特别是在面对复杂、变化的环境时。这种方法的潜力在于,它能够适应各种场景,从而提升未来无人系统在现实世界中的性能。
4
B. Hepp等人
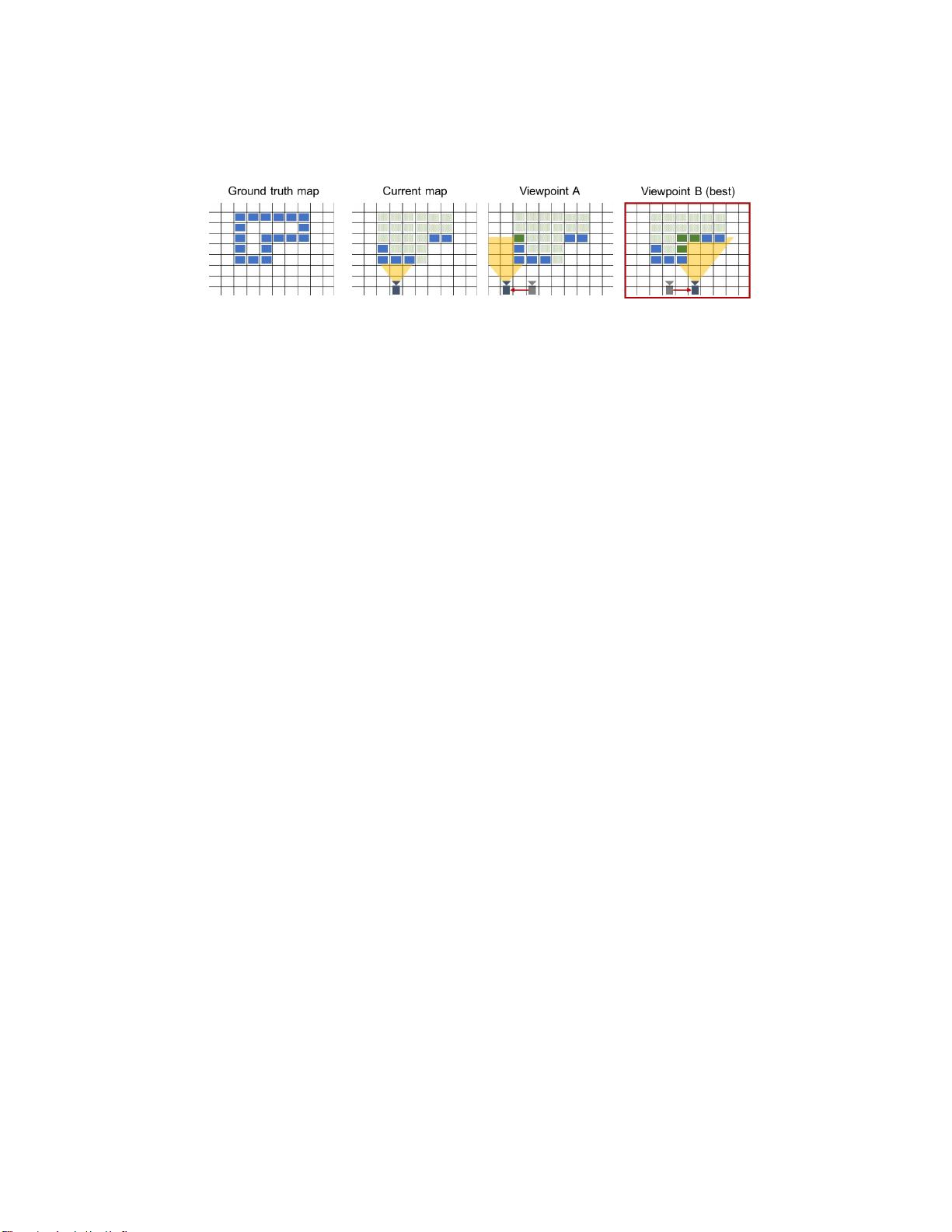
图1:探索任务(为了清楚起见,在此以2D描绘)是发现被占用的表面体素
(在此以蓝色示出)。体素最初是未知的(此处以浅绿色显示),并通过进行
测量来发现,例如,从摄像机里射出光线到场景里。不是表面体素的体素将被
发现为自由体素(此处以白色显示)。每个可能的视点都有一个相应的效用
值,取决于它对我们对表面的认识有多大贡献(在这里以深绿色显示)。为了
决定我们接下来应该去哪个视点,理想的效用得分函数将在执行它们之前告诉
我们视点的预期效用。然后,该函数可以在规划算法中使用,以访问具有最高
预期效用的视点序列
我们提出了一个数据驱动的方法,我们使用监督学习找到一个效用函数,模
仿一个神谕。oracle可以访问地面实况图并且可以计算真实效用分数。对于这项
任务,我们引入了一个地图表示组成的多尺度子卷提取周围的相机的位置。对
于所有可能的视点,该数据在训练时与oracle的分数一起被馈送到3D ConvNet中
直观地,该模型学习预测在给定当前占用图的情况下,针对任何给定姿势看到
额外表面体素的可能性然而,我们没有明确地模拟这种可能性,而是只提供了
oral- cle我们的实验表明,我们的配方推广到新的场景具有不同的对象形状和分
布,并可以处理输入噪声传感器测量结果
我们遵循相关工作[24,8,9]并在模拟但高保真的环境中评估我们的方法。
这允许评估效用函数,并减少环境因素和特定机器人平台的影响。我们的环境
包含了城市地区的建筑物的大小和分布方面的现实模型。此外,重要的是要注
意,我们的技术仅将占用信息作为输入,并且不直接与原始传感器数据接口。
此外,我们测试我们的方法从室外和室内场景的真实数据,以证明我们的方法
不限于合成环境。
4
预测视图实用程序
我们首先正式定义我们的任务和所需的效用函数,然后介绍我们的学习和评估
这个功能的方法。
剩余15页未读,继续阅读
2024-04-12 上传
2024-02-09 上传
2023-03-10 上传
2024-11-05 上传
2024-10-26 上传
2023-05-10 上传
2024-07-04 上传
2023-05-12 上传
2024-10-16 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- garbage.rar_网络编程_Unix_Linux_
- PyPI 官网下载 | techlib-nr-Nresults-1.0.0a13.tar.gz
- ember-cli-google-maps
- grav-plugin-caldav2ics:从远程CalDav日历创建ICS文件
- walk_the_blocks:面向任务的语言调度的计划策略优化的实现
- torch_sparse-0.6.9-cp36-cp36m-win_amd64whl.zip
- OSD.rar_图片显示_Unix_Linux_
- Simpel-blog-VueJs3---Firebase:simpel博客,每个人都可以从firebase中添加或删除每个帖子具有[id,titel,Content,image,createdAt]的帖子
- MONITOR-BOT
- Capture_Image
- chatterbox-server
- HylafaxClient4net-开源
- OneLogin for Google Chrome-crx插件
- torch_sparse-0.6.11-cp37-cp37m-linux_x86_64whl.zip
- todo_app
- word_show.zip_单片机开发_Visual_C++_
