WP-R1智慧型服务机器人:室内导航与机械臂控制研究平台
需积分: 10 139 浏览量
更新于2024-09-09
收藏 75KB DOCX 举报
"WP-R1智慧型服务机器人是一款专为科研院校设计的机器人研究平台,主要应用于机器人定位导航、机械臂控制抓取等领域的研究。它采用三轮全向底盘,配备可升降的机械臂和RGB-D立体相机,能够进行室内定位、物品识别和抓取。机器人还具有自动充电功能,能持续执行任务。通过激光雷达SLAM技术实现自主定位,支持Windows和Linux/ROS操作系统,提供丰富的二次开发资源。此外,WP-R1还具备语音识别和肢体识别功能,适用于人机交互研究。其主要特点包括360°全向移动、立体视觉识别、机械臂操作、自主充电和无线联网。整机参数显示,它拥有强大的运动性能、分布式电控系统和模块化机械结构,确保稳定性和可扩展性。"
此款智慧型服务机器人WP-R1的核心知识点包括:
1. **全向移动底盘**:WP-R1采用三轮全向底盘设计,能够实现360°自由移动,增强了其在复杂环境下的机动性。
2. **激光雷达SLAM**:利用激光雷达和SLAM(Simultaneous Localization and Mapping)技术,机器人可以自我定位并构建环境地图,实现自主导航。
3. **RGB-D立体相机**:高分辨率的RGB-D相机用于室内物体识别和三维空间定位,是机器人视觉技术的重要组成部分。
4. **机械臂控制**:可升降的机械臂配合视觉系统,可以执行精确的抓取和递送任务,涉及机械臂运动学研究。
5. **语音和肢体识别**:内置麦克风和语音识别功能,以及可能的肢体识别技术,使得机器人能够通过语音和动作与人进行交互。
6. **二次开发支持**:支持Windows和Linux/ROS操作系统,为科研人员提供了丰富的开发工具和资源,便于进行定制化研究。
7. **自主充电**:配备自动充电坞,机器人能自主进行充电,确保长时间连续工作。
8. **分布式控制系统**:采用分布式电控系统和总线通讯方式,提升了系统的稳定性与控制精度。
9. **模块化设计**:机械结构的模块化设计便于维修和改装,高级航空铝材质保证了机身强度和耐用性。
10. **无线联网**:支持无线网络连接,允许多机协作,扩展了机器人的应用场景。
这些技术特点使得WP-R1成为机器人科学研究的理想平台,涵盖了自主导航、视觉识别、人机交互等多个关键领域,对于推动人工智能和机器人技术的发展具有重要意义。
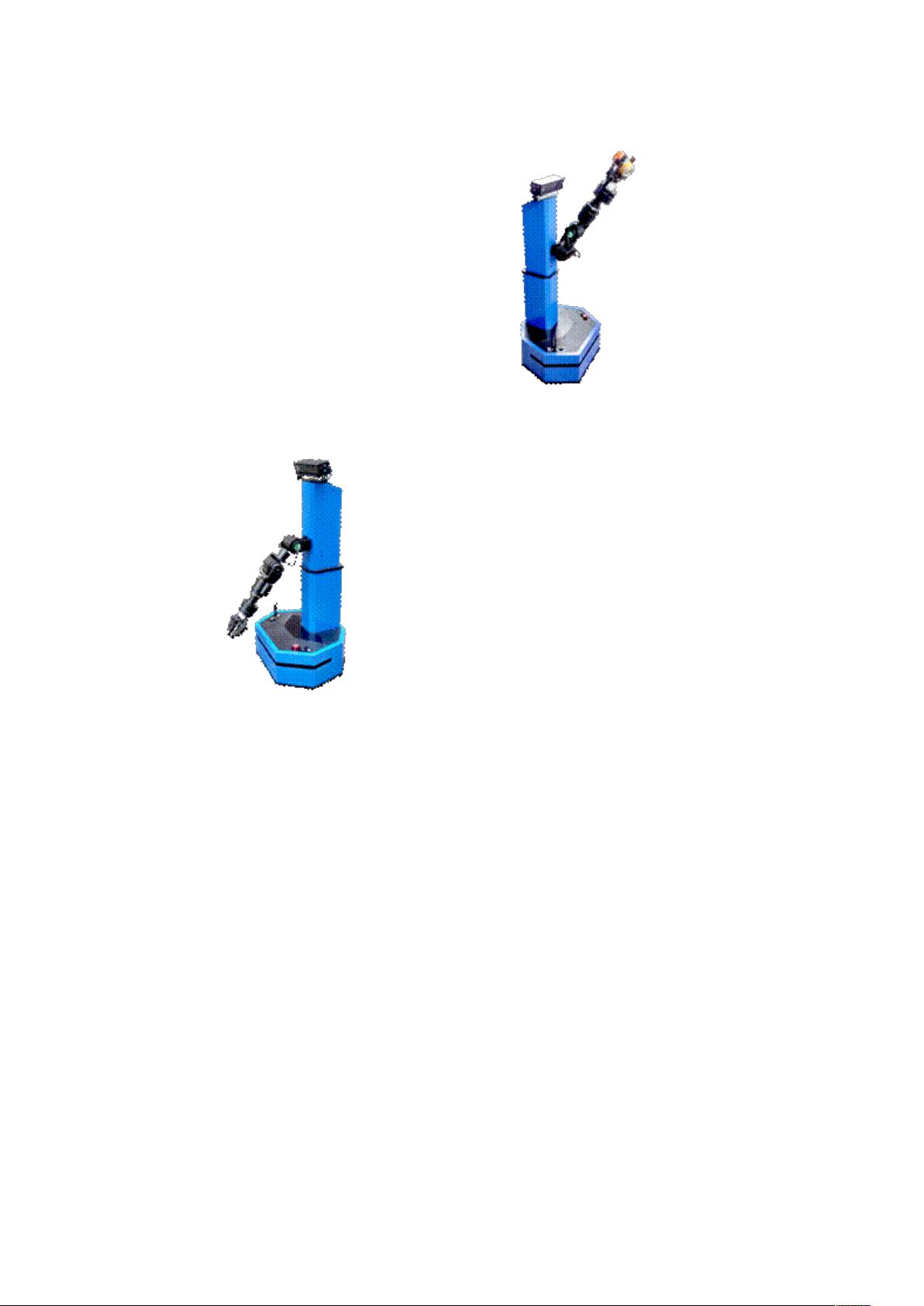
智慧型服务机器人(WP-R1)主体图片
WP-R1 是一款面向科研院校的机器人研究平台,
主要侧重的研究方向是机器人的定位导航以及机械臂的控制抓取。该产品使用
了三轮全向底盘,机身上装备了一条机械手臂,且高度可自由升降,头部搭载
一台高分辨率的 RGB-D 立体相机,可以高效的执行室内的定位导航以及对常
用物品的识别操作任务。该产品还配备了自动充电坞,可以在必要时自主移动
到充电坞进行充电工作,从而实现核心任务的长时间的连续执行。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-14 上传
2021-08-14 上传
2022-01-06 上传
2022-11-02 上传
2021-08-14 上传
2021-10-01 上传

qq_36517155
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Google Test 1.8.x版本压缩包快速下载指南
- Java实现二叉搜索树的插入与查找功能
- Python库丰富性与数据可视化工具Matplotlib
- MATLAB通信仿真设计源代码与应用解析
- 响应式环保设备网站模板源码下载
- 微信小程序答疑平台完整设计源码案例
- 全元素DFT计算所需赝势UPF文件集合
- Object-C实现的Flutter组件开发详解
- 响应式环境设备网站模板下载 - 恒温恒湿机营销平台
- MATLAB绘图示例与知识点深入探讨
- DzzOffice平台新插件:excalidraw白板功能介绍与使用指南
- Java基础实训教程:电子商城项目开发与实践
- 物业集团管理系统数据库设计项目完整复刻包
- 三五族半导体能带参数计算器:精准模拟与应用
- 毕业论文:基于SSM框架的毕业生跟踪调查反馈系统设计与实现
- 国产化数据库适配:人大金仓与达梦实践教程
