
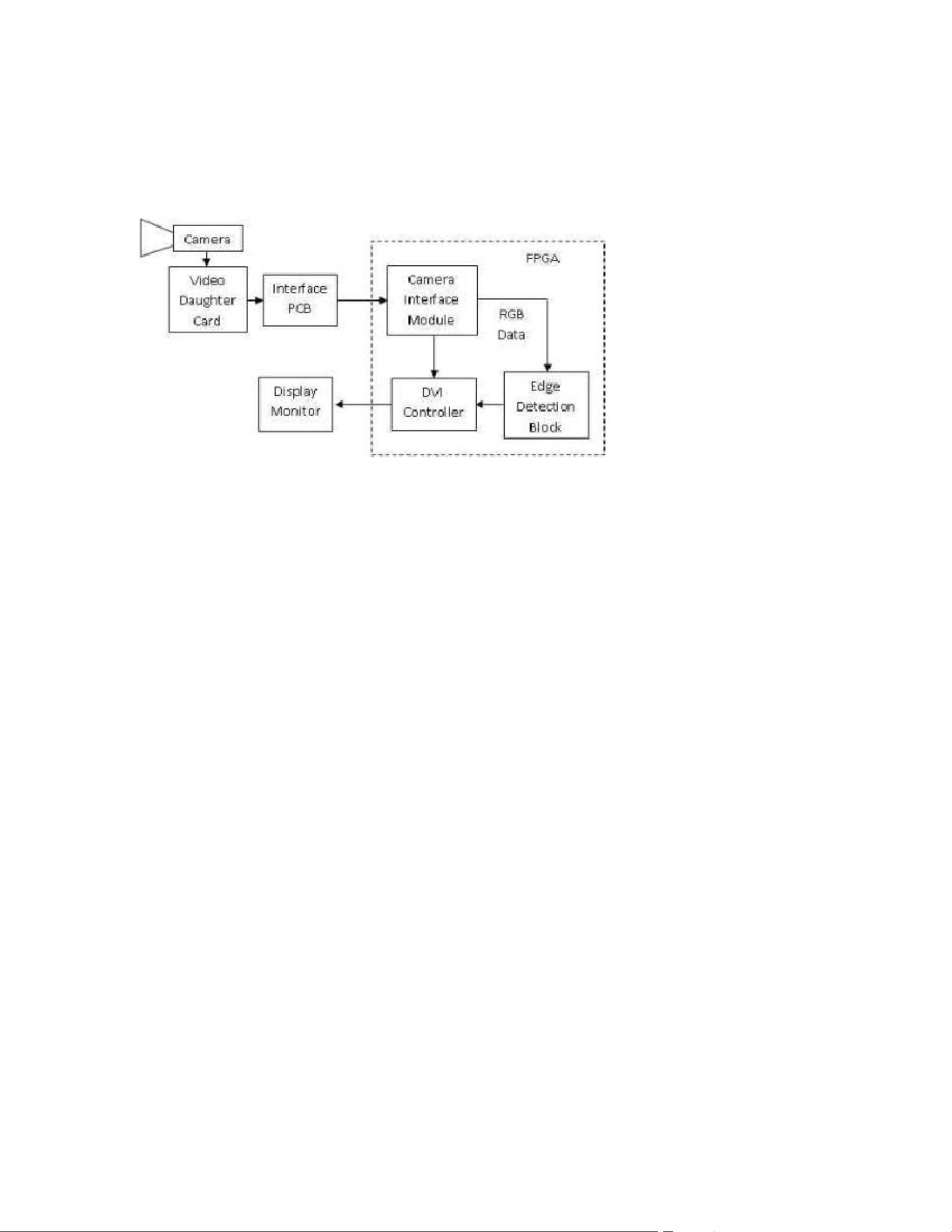
for proper functioning of edge detection block and DVI controller. A
more detailed description of this Camera Interface Design can be found
in [17].
Figure 1. Complete System Block Diagram
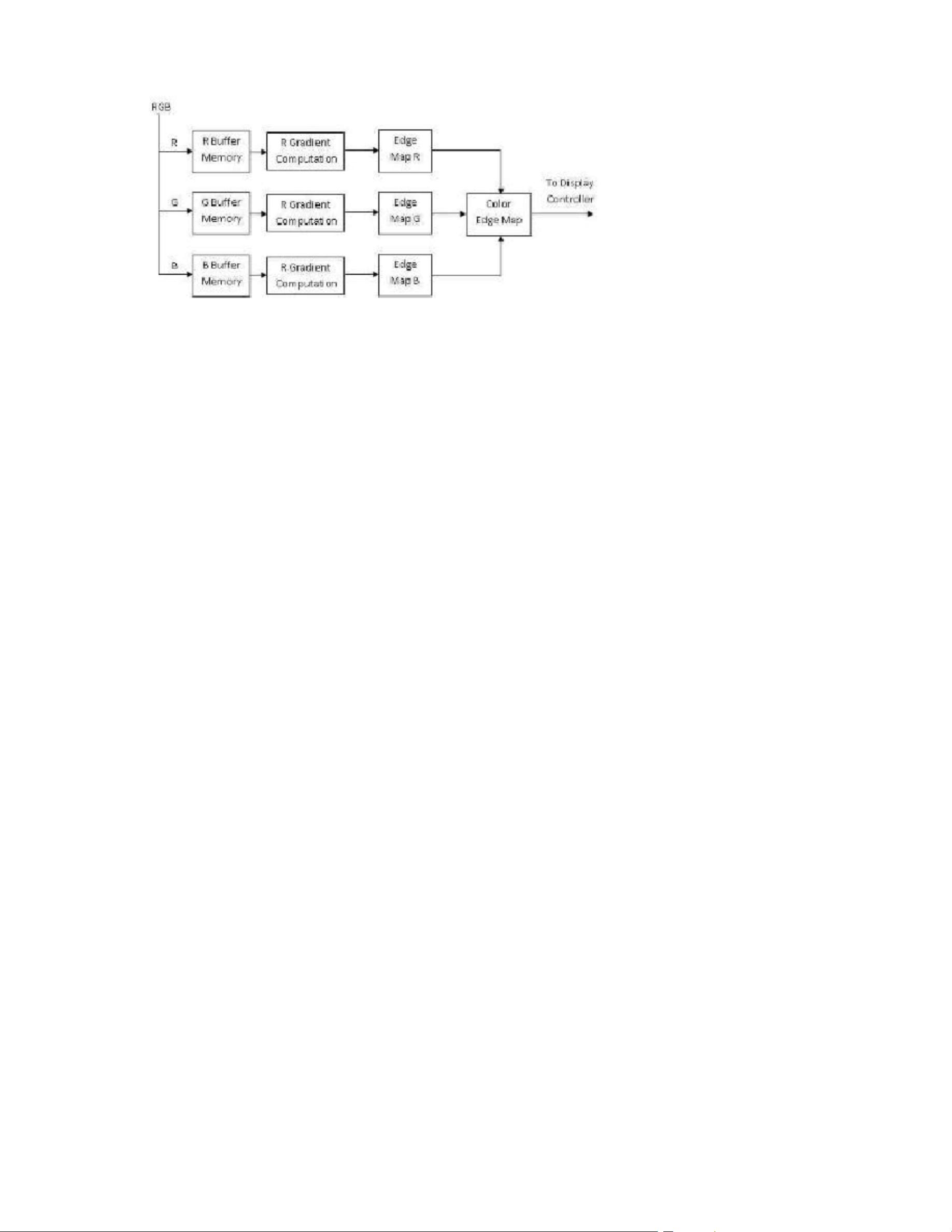
Fig. 2 shows the basic block level data flow diagram for computation
of edges in color images using Sobel operator. The goal is to perform
edge detection three times, once each for red, green, and blue, and then
the output is fused to form one edge map [16]. There are mainly four
stages. First stage is Buffer Memory stage. In this stage, the three
color components are separated and
stored in three different memories. The second stage is gradient
computation stage. In this stage the gradient is computed for each color
component by adding absolute values of horizontal and vertical gradients.
In third stage, the edge map is computed for each color component by
comparing the gradient values with threshold. Final edge map is computed
by combining the edge maps of each color components in stage four.
剩余30页未读,继续阅读

若♡
- 粉丝: 6229
- 资源: 1万+
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- VMP技术解析:Handle块优化与壳模板初始化
- C++ Primer 第四版更新:现代编程风格与标准库
- 计算机系统基础实验:缓冲区溢出攻击(Lab3)
- 中国结算网上业务平台:证券登记操作详解与常见问题
- FPGA驱动的五子棋博弈系统:加速与创新娱乐体验
- 多旋翼飞行器定点位置控制器设计实验
- 基于流量预测与潮汐效应的动态载频优化策略
- SQL练习:查询分析与高级操作
- 海底数据中心散热优化:从MATLAB到动态模拟
- 移动应用作业:MyDiaryBook - Google Material Design 日记APP
- Linux提权技术详解:从内核漏洞到Sudo配置错误
- 93分钟快速入门 LaTeX:从入门到实践
- 5G测试新挑战与罗德与施瓦茨解决方案
- EAS系统性能优化与故障诊断指南
- Java并发编程:JUC核心概念解析与应用
- 数据结构实验报告:基于不同存储结构的线性表和树实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


