V-REP MATLAB仿真接口指南
需积分: 9 35 浏览量
更新于2024-07-15
收藏 1.74MB PDF 举报
"V-rep与Matlab接口指南,摘自官网文档,详述了V-rep与Matlab仿真通信的全过程。"
V-rep(Virtual Robot Experimentation Platform)是一款强大的机器人仿真软件,它允许用户创建复杂的机器人场景并进行仿真。Matlab作为广泛使用的数学计算和工程应用软件,与V-rep的接口使得用户可以利用Matlab的强大计算能力来控制和分析V-rep中的仿真过程。
为什么需要仿真?
机器人仿真在设计、测试和优化机器人行为及控制系统时起着关键作用。通过仿真,可以在不实际操作机器人的情况下预测其行为,避免潜在的安全风险和高昂的实验成本。此外,仿真还可以帮助研究人员探索复杂的机器人系统,如冗余关节、分支结构或封闭回路机械臂的设计。
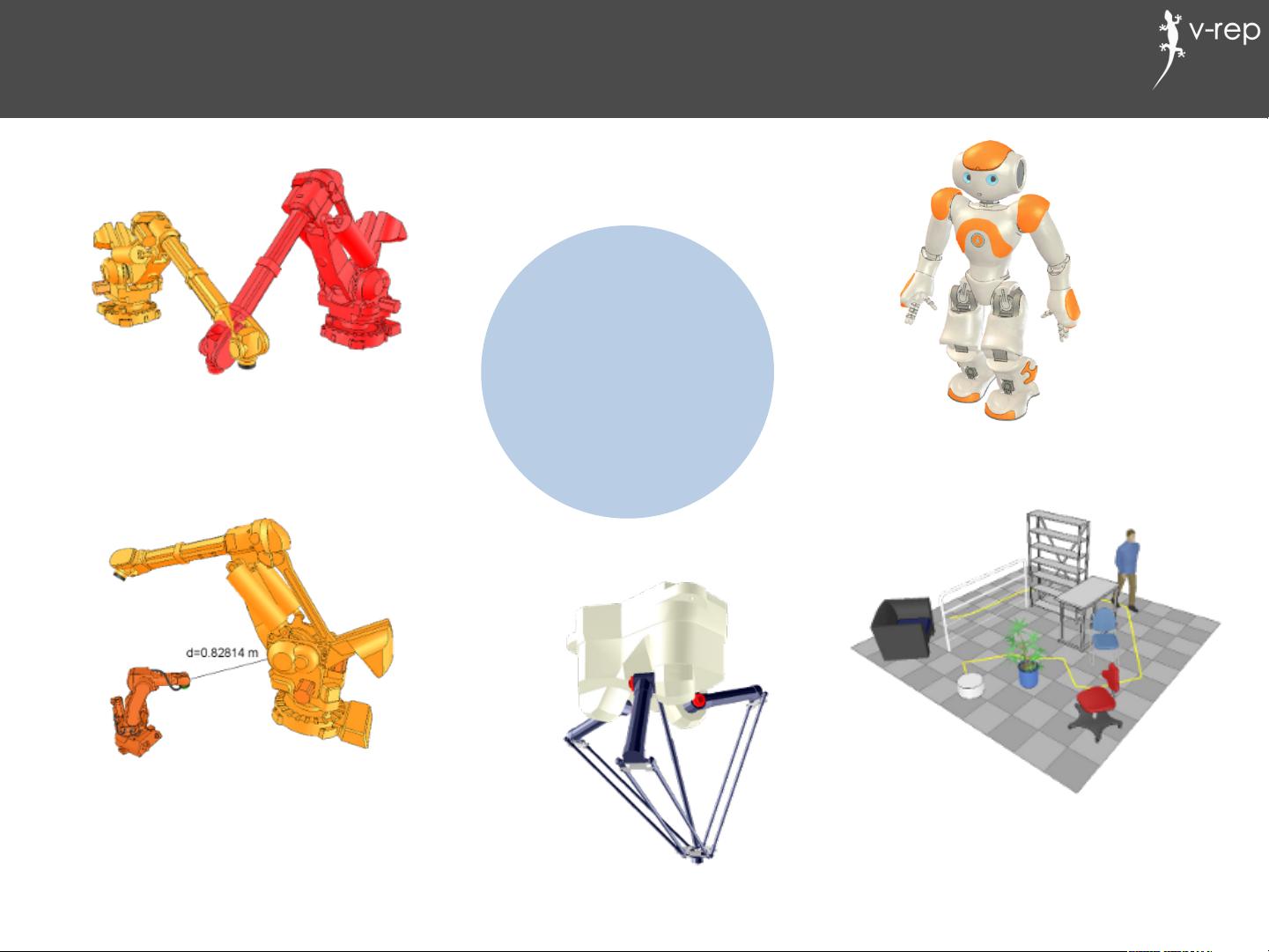
V-rep的三大核心元素:
1. 场景对象:包括形状、关节、相机、光源、虚拟物(参考框架)、图形、路径/轨迹、接近传感器、力/扭矩传感器、视觉传感器、铣削工具和镜子等。这些对象构建了仿真的物理环境,模拟真实世界的物体和交互。
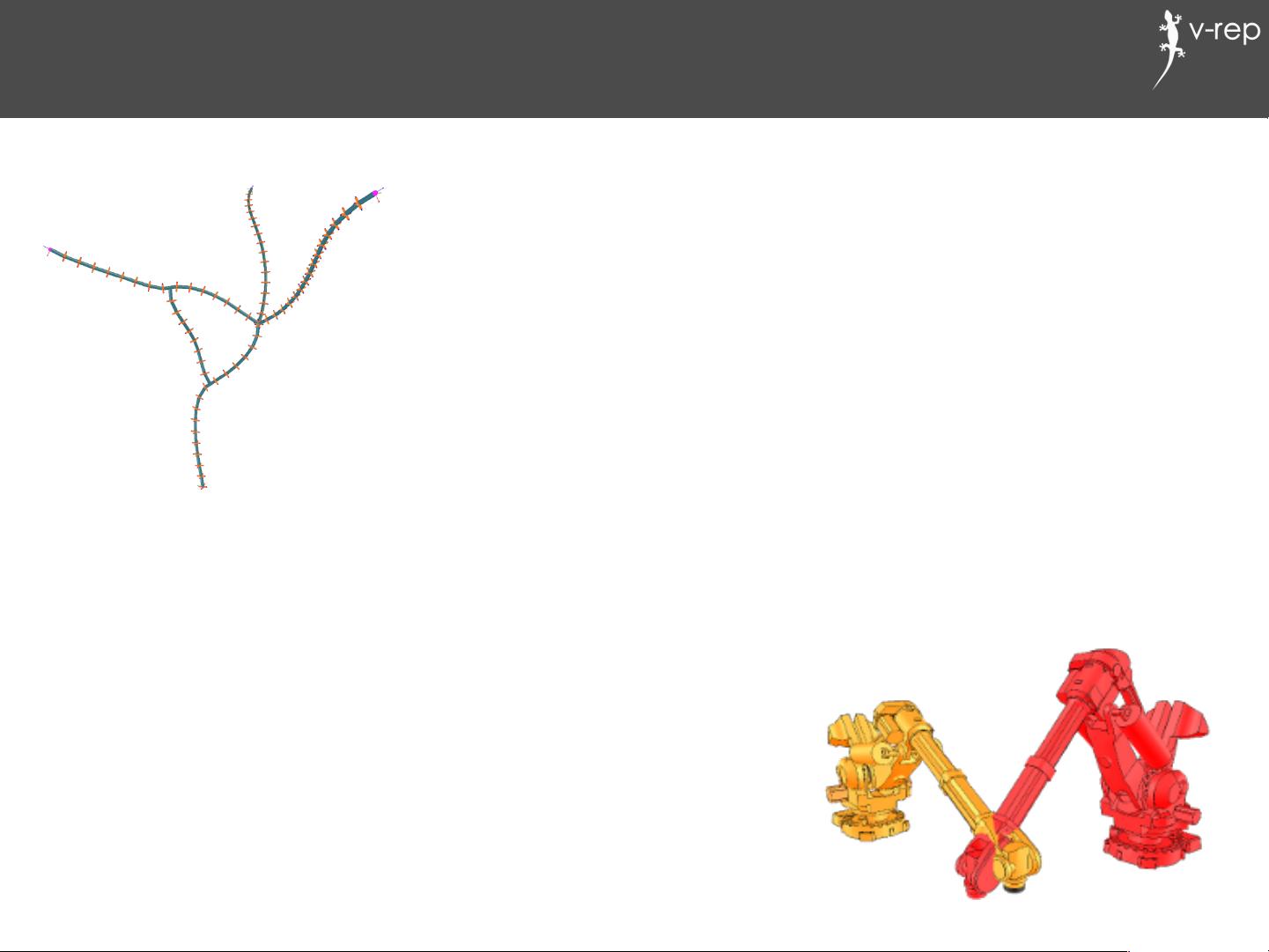
2. 计算模块:提供了多种功能,如最小距离计算、物理/动力学模拟、正向/逆向运动学、路径规划、碰撞检测以及动力学和距离计算。其中,逆向和正向运动学模块能处理各种复杂机制,包括冗余、分支和闭合结构,并支持阻尼/无阻尼解算、加权解算、条件解算和障碍物避障策略。
3. 控制机制:V-rep提供灵活的控制方法,使用户能够通过脚本语言(如Lua)或外部接口(如Matlab)对仿真进行实时控制。
V-rep与Matlab的接口:
Matlab接口使得用户可以直接在Matlab环境中控制V-rep的仿真,实现数据交换和控制指令的发送。这包括但不限于读取传感器数据、设置机器人关节位置、启动和停止仿真等。通过这种方式,用户可以利用Matlab强大的数值计算和可视化功能,进行高级的控制策略设计和数据分析。
例如,用户可以编写Matlab脚本来规划机器人的运动路径,然后将该路径传递给V-rep,由V-rep执行路径规划并实时反馈仿真结果。此外,用户还可以在Matlab中进行实时监控和调整,以优化机器人的行为。
V-rep和Matlab的集成为机器人研究和开发提供了一个强大的工具链,促进了理论研究与实际应用之间的无缝对接。通过这两个工具的结合,用户可以进行高精度的仿真测试,优化机器人系统,并为实际部署做好充分准备。
Calcula0on%Modules%
Calcula0on%
Modules%
Minimum%distance%calcula0on%
Physics%/%Dynamics%
Forward%/%Inverse%kinema0cs%
Path%/%mo0on%planning%
Collision%detec0on%
剩余35页未读,继续阅读
1016 浏览量
点击了解资源详情
233 浏览量
V-REP Coppeliasim与MATLAB联合仿真技术:机械臂抓取与轨迹规划的建模仿真研究,V-REP Coppeliasim与MATLAB联合仿真技术:机械臂抓取与运动规划的实践应用,vrep
2025-02-14 上传
"基于V-REP与MATLAB联合仿真的小车项目:循迹、避障、走迷宫及路径规划的详细代码与文档说明匹配版",V-REP小车项目+匹配文档,基于V-REP与MATLAB联合仿真,小车能够完成循迹、避障、
2025-01-17 上传
1016 浏览量
2022-07-14 上传
"基于V-REP与MATLAB联合仿真的小车项目:循迹、避障、走迷宫及路径规划的详细代码与文档说明匹配版",基于V-REP与MATLAB联合仿真的小车项目:循迹、避障、走迷宫与路径规划的详细代码与文档
2025-02-12 上传
2024-12-31 上传

YY10927042
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Oracle9i RMAN备份与恢复技术详解
- STATSPACK深度解析:Oracle函数关键指标与应用
- Oracle SQL语法详解与应用
- Richard Hightower的《Jakarta Struts Live》深度解析指南
- WAVECOM AT指令集详解
- JSTL in Action:探索强大的功能与全面介绍
- Eclipse集成 Axis 开发Web服务教程
- MATLAB常用函数详解及应用
- Spring框架开发者指南:V0.6预览版
- HTML速查手册:关键标签与文件结构解析
- HTML语法速成:关键元素与属性解析
- C++编程规范与最佳实践
- C++实现的图书管理系统源码解析
- C#与XQuery中文资源指南
- Linux内核0.11完全注释解析
- 爱鸥电子标签拣货系统L-PICK:创新物流解决方案
