能量基控制器解耦:动力伞翼无人机控制新方法
94 浏览量
更新于2024-08-27
收藏 638KB PDF 举报
"Energy-Based Controller Decoupling of Powered Parafoil Unmanned Aerial Vehicle"
这篇研究主要探讨了动力伞翼无人机(Powered Parafoil Unmanned Aerial Vehicle,PPUAV)的控制解耦方法。PPUAV是一种创新的无人机类型,适用于大范围、长时间的监视和空投任务。它的构成包括伞翼罩、有效载荷和悬挂线,具有结构简单、成本低和负载能力高的优点。然而,由于其明显的质量分布和柔性连接,为PPUAV设计精确的控制器非常困难,传统的PID控制器由于输入与输出之间的耦合效应而不太适用。
文章首先提出了一种实用的建模方法,旨在捕捉PPUAV的主要特性,并通过实际飞行测试验证了所提出的模型。为了处理这种耦合效应,研究者提出了一种基于能量的新颖控制方法。这种方法具有明确的调整步骤,且模型独立于特定的动态参数,提高了控制效率和系统稳定性。
在PPUAV的控制系统设计中,耦合问题是一个关键挑战。传统的控制器设计方法往往无法有效地处理输入与输出之间的相互影响,这可能导致控制性能下降。基于能量的控制策略则提供了一种新的思路,它利用系统的能量流动来设计控制器,从而实现输入和输出的解耦。这种方法能够独立地控制各个子系统,增强系统的可控性和鲁棒性。
该研究通过模型简化和系统识别技术,对PPUAV的动力学特性进行了深入分析。模型简化是为了降低复杂性,使得控制器设计更为可行;系统识别则是通过实验数据来确定系统的数学模型,确保控制器设计的准确性和有效性。结合实际飞行测试的结果,证明了所提方法的有效性。
这项工作对于理解PPUAV的动力学行为和设计更高效的控制器具有重要意义,不仅解决了动力伞翼无人机的控制难题,也为其他类型的柔性连接或耦合系统提供了可能的控制策略。这一研究进一步推动了无人机技术的发展,特别是在大型无人空中平台的控制和应用方面。
Energy-Based Controller Decoupling of Powered
Parafoil Unmanned Aerial Vehicle
Li Bingbing
1, 2
, Yang Liying
1
, He Yuqing
1
, Han Jianda
1
1 State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016,
China
2 University of Chinese Academy of Sciences, Beijing 100049, China
Abstract—Powered Parafoil Unmanned Aerial Vehicle
(PPUAV), which is suitable for large-area and long-time
surveillance and airdrop missions, is a type of innovative
UAV. It consists of parafoil canopy, payload and suspension
lines, and has the advantages of simple structure, low cost
and high load capacity. However, due to the apparent mass
and flexible connection, it is hard to build an accurate
model for controller design for PPUAV. Normal PID
controller is unsuitable for PPUAV because of the inputs'
coupling effects on outputs. This paper presents an
applicable method of modeling to capture the main
characteristics of PPUAV, and the proposed model is
validated by actual flight test. To deal with the coupling
effect, a novel control method based on energy is proposed.
The method has clear adjustment procedures and is more
practical and effective than normal PID controller. The
simulation results show its effectiveness on PPUAV.
Keywords—powered parafoil; UAV; model simplification;
system identification; input and output coupled system;
energy-based controller; controller decoupling
I. INTRODUCTION
A. Introduction of PPUAV
Powered Parafoil Unmanned Aerial Vehicle (PPUAV)
is a small aircraft, which is able to cover large horizontal
distances from the release point. It provides a unique
capability for air-transport of heave payloads according
to the high payload-weight-ratio[1]. PPUAV is compact
before parafoil deployment and lightweight, and it flies at
low speed and impacts the ground with low velocity.
PPUAV is often considered to be safer than normal
fixed-wing aircraft because of its inherent stability,
limited response to control inputs, and stall resistance[2].
All of the above advantages make it a suitable platform
for field investigations, search and rescue, and
delivery[3].
However, PPUAV has the characteristics of
complexity, uncertainty, nonlinearity, time-varying,
control delay and large inertia, and is easily affected by
the atmospheric environment[4]. PPUAV is strongly
influenced by apparent mass because of its light
weight[5]. A unique feature of PPUAV is the high degree
of variability of flight dynamic, which make its practical
applications to be a great challenge[6].
B. Control mechanism
The general control mechanism for PPUAV is left
and right brake deflection and thrust provided by the
engine. The asymmetric deflection of left or right brake
makes PPUAV to turn. And the engine provides thrust to
take off and accelerate. Predictable changes in
aerodynamic loads is caused by thrust and canopy
changes, which is the method of controlling PPUAV. The
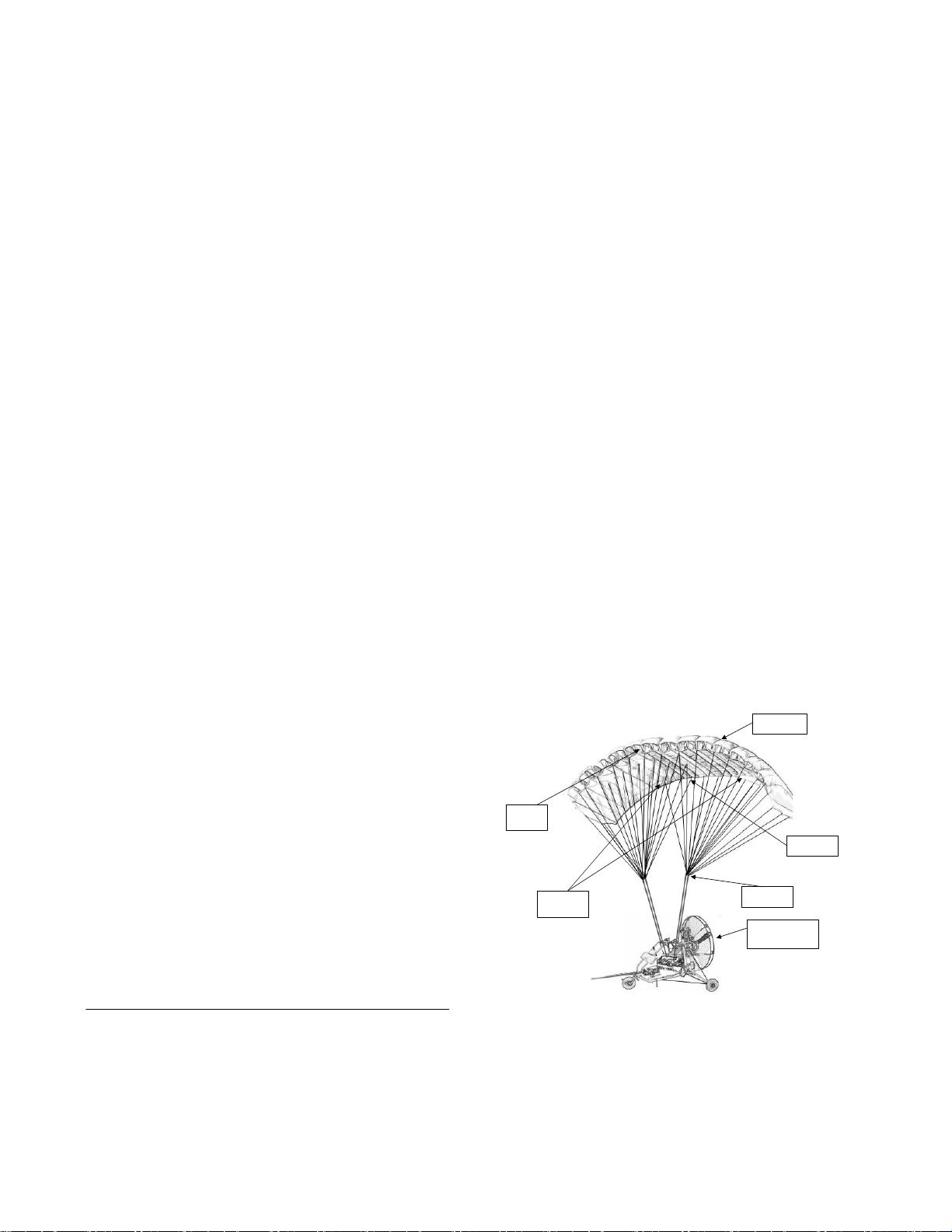
structure of the system is shown in Fig. 1.
Parafoil
Canopy
Leading
Edge
Control
Ropes
Unmanned
Powered Vehicle
Suspension
Ropes
Trailing
Edge
This work is supported by National Nature Sciences Foundation of
China(Grant No. 61503369 and 61528303) / The state key laboratory of
robotics / Chinese National Key Technology R&D Program (Grant No.
Y4A1208101)
下载后可阅读完整内容,剩余7页未读,立即下载
121 浏览量
108 浏览量
188 浏览量
326 浏览量
185 浏览量
2024-10-30 上传
2024-11-02 上传
450 浏览量
2023-11-30 上传

weixin_38636461
- 粉丝: 5
- 资源: 894
 我的内容管理
展开
我的内容管理
展开







最新资源
- 电力负荷和价格预测网络研讨会案例研究:用于日前系统负荷和价格预测案例研究的幻灯片和 MATLAB:registered: 代码。-matlab开发
- SHC公司供应商商行为准则指南
- QtCharts_dev_for_Qt4.8.6.zip
- 一款具有3D封面转动的效果
- selectlist:非空列表,其中始终仅选择一个元素
- ktor-permissions:使用身份验证功能为Ktor提供简单的路由权限
- 数据库课程设计---工资管理系统(程序+源码+文档)
- comparison_of_calbration_transfer_methods.zip:三个数据集校准传递方法的比较-matlab开发
- APQP启动会议
- NLW-后端:后端应用程序级别下一个星期NLW01 Rocktseat
- javascript-koans
- Información Sobre los Peces-crx插件
- COMP9102:COMP9102
- 第三方物流与供应链及成功案例课件
- squeezebox_wlanpoke_plot
- 学习Android Kotlin核心主题
