RealView MDK:ARM嵌入式系统中CAN总线仿真与LPC2378应用
28 浏览量
更新于2024-08-30
1
收藏 264KB PDF 举报
嵌入式系统/ARM技术中的基于RealView MDK的CAN总线仿真研究是一篇探讨如何利用ARM公司的RealView MDK(μVision3集成开发环境和RealView编译器)进行CAN总线软件开发的文章。RealView MDK作为一款强大的嵌入式开发工具,特别强调了其对ARM7、ARM9和Cortex-M3处理器的全面支持,以及设备模拟、性能分析等高级特性。
该研究首先介绍了RealView MDK在嵌入式开发领域的广泛应用和其优势,它不仅仅局限于内核指令集的仿真,而是提供了完整的硬件模拟,允许开发人员在没有实际硬件的情况下进行软件开发和调试,从而实现了软硬件开发的同步进行,显著提高了开发效率。这对于基于ARM的系统设计尤其重要,因为通过设备模拟,开发者能够更好地理解和测试CAN总线通信,这对于确保系统的稳定性和准确性至关重要。
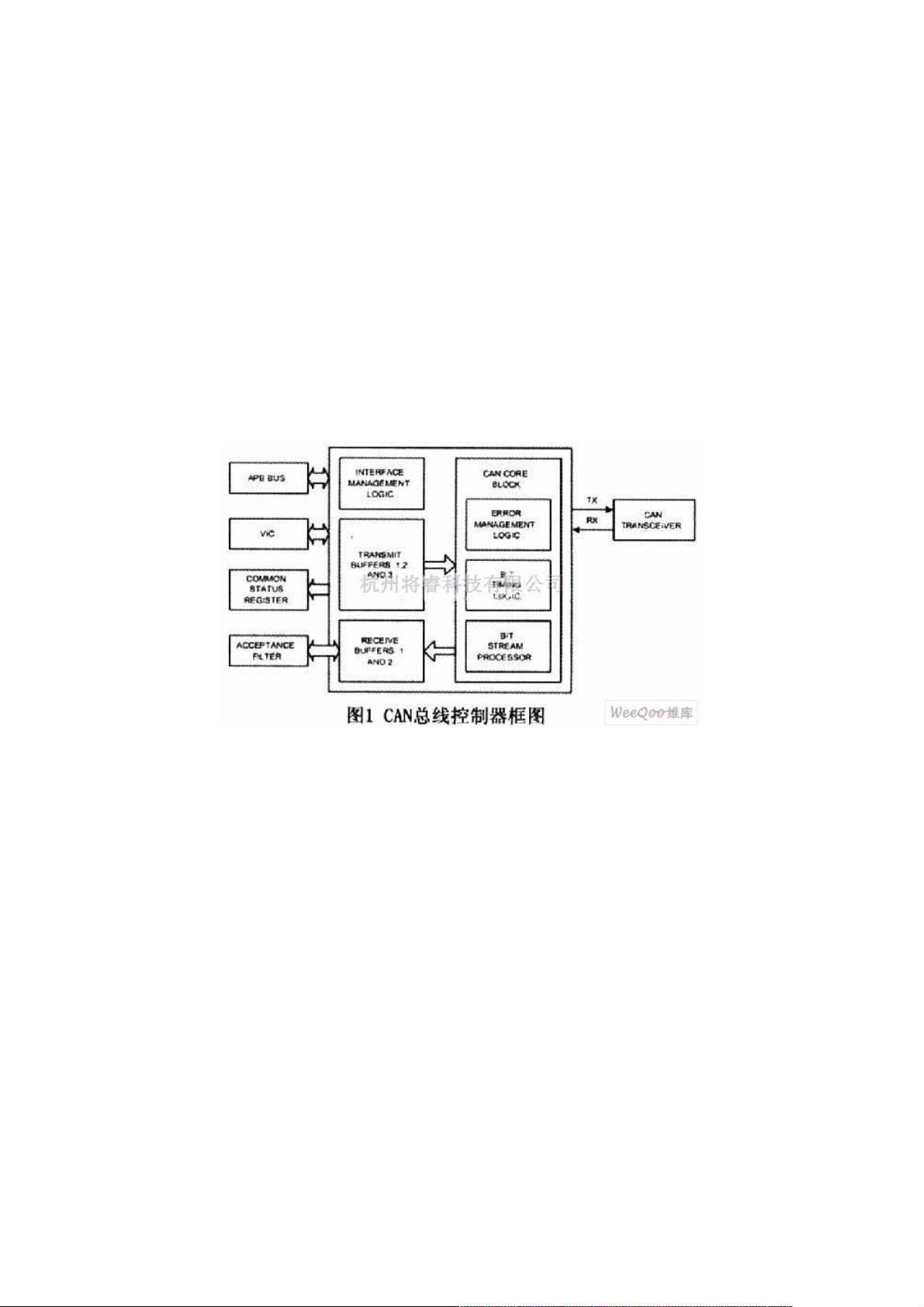
CAN总线作为一种广泛应用于汽车和工业控制领域的通信协议,其控制器如LPC2378这款ARM7微控制器,拥有两个独立的CAN模块。作者在文章中详细阐述了如何在RealView MDK环境下,针对LPC2378这样的特定硬件平台,设计和实现CAN总线的驱动程序和应用程序,包括设置启动代码,配置通信参数,以及处理中断和数据传输。
此外,文中还会涉及CAN总线的原理和工作方式,包括它的帧结构、错误检测机制以及在不同应用场景中的具体应用案例。通过这些内容,读者不仅能了解到RealView MDK在CAN总线开发中的实际操作,还能深入理解CAN总线技术在嵌入式系统中的作用。
总结来说,本文结合了嵌入式系统开发的基础知识、RealView MDK的功能特性和CAN总线的实际应用,为开发人员提供了一种有效的工具和技术手段,以提升他们在嵌入式系统中实施CAN总线通信的能力。通过仿真研究,开发人员能够更高效地验证和优化他们的设计,从而推动了嵌入式系统技术的发展。
嵌入式系统嵌入式系统/ARM技术中的基于技术中的基于RealView MDK的的CAN总线仿总线仿
真研究真研究
摘要:RealView MDK具有强大的仿真功能,能仿真很多ARM芯片内部外设。文章以RealView MDK为开发环
境,叙述了CAN总线的软件开发过程,并给出了仿真结果。 0 引言 RealView MDK是ARM公司的产
品,被全球超过10万的嵌入式开发工程师验证和使用,是ARM公司目前最新推出的针对各种嵌入式处理器的软
件开发工具。RealView MDK集成了业内最领先的技术,包括μVision3集成开发环境与RealView编译器。支持
ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备
模拟、性能分析等
摘要:RealView MDK具有强大的仿真功能,能仿真很多ARM芯片内部外设。文章以RealView MDK为开发环境,叙述了
CAN总线的软件开发过程,并给出了仿真结果。
0 引言
RealView MDK是ARM公司的产品,被全球超过10万的嵌入式开发工程师验证和使用,是ARM公司目前最新推出的针对
各种嵌入式处理器的软件开发工具。RealView MDK集成了业内最领先的技术,包括μVision3集成开发环境与RealView编译
器。支持ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备模
拟、性能分析等功能。
当前多数基于ARM的开发工具都有仿真功能,但是仅仅局限于对内核指令集的仿真。而RealView MDK的设备模拟器可以
仿真整个目标硬件,包括快速指令集仿真、外部信号和I/O仿真、中断过程仿真、片内外围设备仿真等。开发工程师在无硬件
的情况下即可开始软件开发和调试,使软硬件开发同步进行,大大缩短开发周期。而一般的ARM开发工具仅提供指令集模拟
器,只能支持ARM内核模拟调试。
CAN总线即控制器局域网(Controller Area Net)是一种现场总线,主要用于各种过程检测及控制。CAN最初是由德国
BOSCH公司为汽车监测和控制而设计的,目前CAN已逐步应用到其它工业控制中,现已成为ISO-11898国际标准。
下载后可阅读完整内容,剩余3页未读,立即下载
2019-06-22 上传
2020-08-09 上传
2020-10-26 上传
2014-06-08 上传
2012-11-27 上传
2011-08-02 上传
2011-02-24 上传
2021-12-20 上传

weixin_38587509
- 粉丝: 4
- 资源: 914
 我的内容管理
展开
我的内容管理
展开







最新资源
- demi-cluster:demi.ro的代码
- 使用 Matlab 进行特征选择:选择使正确分类率最大化的特征子集。-matlab开发
- SpringMVC_Project
- Profile.Api
- 缓存搜索框的搜索记录
- Link_start:任务中使用的链接:fire:
- angular-price-io
- Accuinsight-0.0.186-py2.py3-none-any.whl.zip
- Memories-App:一个简单的社交媒体 MERN 应用程序,允许用户发布他们生活中发生的有趣事件
- Smart-Parking-System---MATLAB
- UOL-crx插件
- ZenTimings
- 基于PHP的最新小储云商城免授权PHP源码.zip
- 模拟量4-20ma转换程序.rar
- Accuinsight-1.0.29-py2.py3-none-any.whl.zip
- Cloud_Ramos
