鲁棒分布式定位:应对噪声的智能传感器网络算法
91 浏览量
更新于2024-08-27
收藏 896KB PDF 举报
“分布式网络本地化:带有噪声测量和通信信息的准确估计”
本文深入探讨了在传感器网络中,如何在存在测量噪声和通信噪声的情况下,解决没有共享公共参考系的节点定位问题。针对这一挑战,文章提出了两种创新的算法:一种是鲁棒的分布式方向估计算法,另一种是鲁棒的分布式节点定位算法。这两种算法的设计目标是有效地抑制由噪声引起的不确定性。
首先,鲁棒分布式方向估计算法旨在处理由于测量设备不精确或环境干扰导致的方向测量误差。通过构建无偏估计器,该算法能够利用历史测量信息来校正测量噪声的影响,从而提高方向估计的准确性。其次,为了降低通信噪声对定位精度的影响,文章引入了随机逼近方法。这种方法允许传感器节点在网络中逐步调整其估计位置,以更接近实际位置,即使在通信链路质量不稳定的情况下也能保持稳健。
论文进一步假设测量噪声和通信噪声具有零均值和独立性,这是许多统计分析的基础。在这种情况下,作者证明了一个关键的理论结果:只有当网络包含至少一个已知位置的“锚节点”时,所有的传感器节点才能在设计的算法下几乎确定地渐近确定它们自己的方位角和位置。这种网络结构要求通信和距离传感拓扑以锚节点集为根,并且连接了相应的方位传感拓扑,以确保信息的有效传递和处理。
此外,论文还讨论了在仅考虑测量噪声或通信噪声的特殊情况下,算法的收敛速率。这为理解和优化算法性能提供了定量依据。通过一系列的仿真实验,验证了所提出的算法在实际应用中的有效性和效率,证明了其在有噪声环境下的强大适应性。
这项工作对于理解和解决传感器网络中的本地化问题具有重要的理论价值和实践意义,特别是在存在多种噪声源的复杂环境中。它为未来的研究提供了新的思路,包括改进噪声抑制技术、优化网络拓扑设计以及开发更加适应现实世界挑战的定位算法。
WANG AND TIAN: DISTRIBUTED NETWORK LOCALIZATION: ACCURATE ESTIMATION WITH NOISY MEASUREMENT 5929
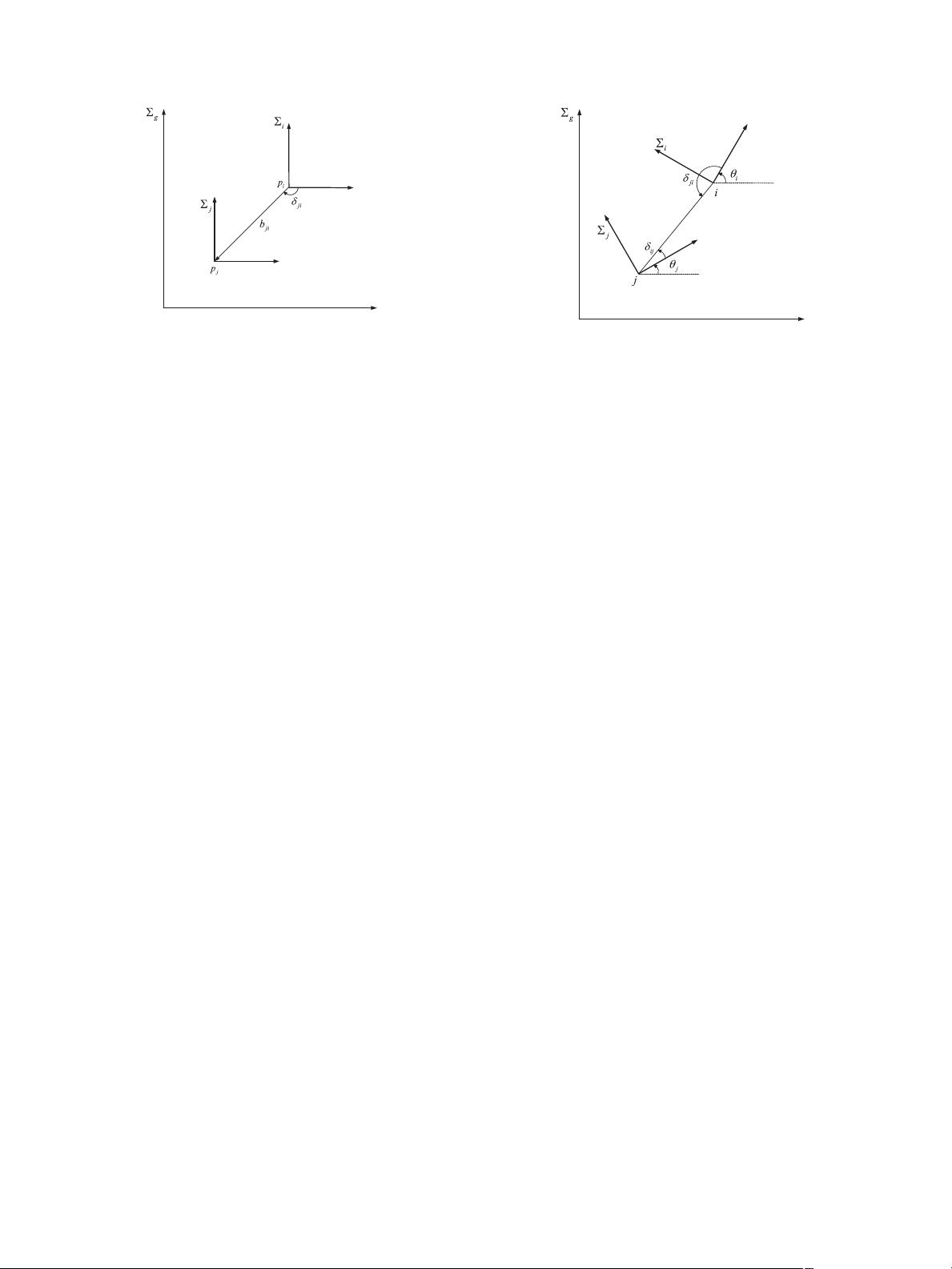
Fig. 1. The relative position measurement under the case that all nodes share
a common reference frame.
network is described by digraph G = {V, E, A}, and its bearing-
sensing topology is described by
¯
G, the undirected graph induced
from G.
We denote by p
i
∈ C,i ∈Vthe accurate position of node i
in a global or called common coordinate system denoted by Σ
g
.
Denote by V
0
= {1,...,s} the set of anchor nodes whose po-
sitions p
i
,i∈V
0
, are known. Denote by V
1
= {s +1,...,N}
the set of sensor nodes whose positions p
i
,i∈V
1
aretobe
determined. Each node i ∈V
1
makes and records its all mea-
surements with respect to its own local coordinate system Σ
i
,
whose origin is assumed to be just at the position of node i, and
whose orientation with respect to Σ
g
is a constant denoted by
θ
i
∈ (−π, π]. θ
i
is assumed to be unknown for each sensor node
i ∈V
1
. We call all nodes share a common reference frame, if
directions of the coordinate axis of each node’s local coordinate
system are the same as ones of the common coordinate system
(i.e., θ
i
=0, ∀i ∈V). As for the anchor, since its position in Σ
g
is known, we set its orientation θ
i
=0, ∀i ∈V
0
, without loss of
generality.
Firstly, we assume all nodes share a common reference frame.
Then, as shown by Fig. 1,
b
ji
= p
j
− p
i
(1)
is the relative position of j measured by node i, which can be ex-
pressed as b
ji
= |b
ji
|e
ıδ
ji
with δ
ji
∈ (−π, π] denoting the bear-
ing of node j in Σ
i
. In practice, the relative position information
can be obtained by the node through the distance measurement
and bearing measurement, where an alternative distance mea-
surement method is the time of arrival (TOA) method (see, e.g.,
[2]) and the bearing can be measured by a bearing measurement
sensor, such as a camera (see, e.g., [21]) or an antenna array (see,
e.g., [22]). Let b
i
be the weighted sum of the relative positions
of all the node i’s neighbors measured by node i, i.e.,
b
i
=
j∈N
i
a
ij
b
ji
. (2)
For all anchor nodes, we let b
i
=0, ∀i ∈V
0
. Then, we can
aggregate (1) and (2) for all nodes into the following form
−Lp = b, (3)
Fig. 2. The bearing measurement in local coordinate systems and orientations.
where L is the Laplacian matrix of G(A) with partition L =
[
00
L
1
L
2
], p =[p
1
,...p
N
]
T
, b =[b
1
,...,b
N
]
T
.
Obviously, to ensure the localizability of the network with
relative position measurements, L
2
should be i nvertible. By
Lemma 3.1 given in [23], we know that the non-singularity of
L
2
is guaranteed if and only if the relative position sensing
topology G is 1-rooted at the anchor node set. A distributed
iterative localization algorithm can be constructed as
ˆp
i
(t +1)= ˆp
i
(t)+c
j∈N
i
a
ij
(ˆp
j
(t) − ˆp
i
(t) − b
ji
),i∈V
1
,
(4)
where t ∈ N, c is a small positive constant to be designed,
ˆp
i
∈ C,i ∈V
1
denotes estimate of the position p
i
made by
node i at the tth iteration. Let ¯p
T
(t)=[¯p
1
(t),...,¯p
N
(t)] with
¯p
i
(t)=ˆp
i
(t) − p
i
, ∀i ∈V. By (1), Eq. (4) together with ¯p
i
(t) ≡
0, ∀i ∈V
0
, can be aggregated into
¯p(t +1)=(I − cL)¯p(t).
(5)
Now, we can see that the relative-position based node-
localization problem with multiple anchor nodes can be trans-
formed into a consensus control problem with multiple leaders
at the same positions [23], [24].
Then, we consider the case that all nodes do not share a
common reference frame, which implies that there are some
nodes i ∈V
1
such that θ
i
s are unknown and θ
i
=0in general
(see Fig. 2). In this case, p
j
− p
i
is no longer equal to b
ji
, and
instead, we have
p
j
− p
i
= e
ıθ
i
b
ji
. (6)
In order to achieve the node-localization, each sensor node i ∈
V
1
needs to determine its own orientation θ
i
(or the orientation
vector e
ıθ
i
) first and then determine its position in the common
coordinate system.
Denote the relative bearing μ
ji
= δ
ji
− δ
ij
and define the
relative orientation
θ
ji
Δ
= PV(θ
j
− θ
i
), (7)
with PV(θ
j
− θ
i
)
Δ
=[(θ
j
− θ
i
+ π)mod2π] − π. The follow-
ing lemma, which is a restatement of the result of [16], shows the
relation between the relative orientation and the relative bearing.
剩余13页未读,继续阅读
391 浏览量
MATLAB代码:分布式最优潮流 关键词:网络划分;分布式光伏;集群电压控制;分布式优化;有功缩减 参考文档:《含分布式光伏的配电网集群划分和集群电压协调控制》 仿真平台:MATLAB 主要内容:本文
2025-01-10 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38540819
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
