实时非线性预测控制:基于神经网络的自适应磁悬浮系统
需积分: 15 108 浏览量
更新于2024-09-16
1
收藏 144KB PDF 举报
预测控制是一种先进的控制策略,本文档主要探讨了如何通过结合神经网络与广义预测控制来实现实时自适应控制,特别是在处理具有相对快速时间常数的非线性系统时。作者Pam Haley、Don Soloway和Brian Gold来自NASA的机构,他们的研究旨在展示这种非线性广义预测控制算法在实际应用中的可行性。
传统上,广义预测控制(GPC)主要用于处理时间常数较慢的过程控制系统,通过预先设计的线性控制律来管理动态。然而,在这个研究中,他们关注的是一个磁悬浮设备,这是一个典型的非线性且开环不稳定系统。为了应对这种复杂性,他们构建了一个参考模型,该模型是嵌入在神经网络中的,其中包含了初始的线性模型。这样,即使在神经网络训练初期,基于线性模型的控制也能提供初步的稳定性。
神经网络的优势在于其能够处理非线性关系,并允许在线适应,这意味着控制法则可以根据实际运行中的未建模或随时间变化的动态特性进行调整。这种方法的关键在于,即使面对快速变化的系统行为,通过不断学习和优化网络权重,控制算法能够动态地调整,确保系统的稳定性和性能。
在本文中,作者通过仿真展示了将神经网络应用于这种实时自适应控制的具体步骤和技术细节。实验结果显示,这种结合非线性广义预测控制和神经网络的方法在实际的磁悬浮设备控制中表现出良好的效果,验证了这种方法在处理快速变化的非线性系统上的潜力和实用性。
总结来说,本文的核心知识点包括:
1. **非线性广义预测控制**:一种扩展的传统控制策略,适用于处理非线性系统,尤其是那些快速变化的情况。
2. **神经网络模型**:作为参考模型,神经网络嵌入线性模型,提供初始稳定性和可在线学习的能力。
3. **实时自适应控制**:利用神经网络的在线学习,实现对未知或时间变异动态的适应性控制。
4. **磁悬浮设备示例**:实际应用案例,展示了这种方法在非线性、不稳定系统上的控制效果。
通过深入理解这些概念和技术,工程师可以更好地应用预测控制方法,特别是在需要实时适应性和高效性能的现代工业控制系统中。
Real-time Adaptive Control Using Neural Generalized Predictive Control
Pam Haley,NASA Langley Research Center -
p.j.haley@larc.nasa.gov
Don Soloway, NASA Ames Research Center – don@ptolemy.arc.nasa.gov
Brian Gold,Langley Aerospace Research Summer Scholar -
bgold@vt.edu
Abstract
The objective of this paper is to demonstrate the feasibility of a
Nonlinear Generalized Predictive Control algorithm by showing
real-time adaptive control on a plant with relatively fast time-
constants. Generalized Predictive Control has classically been
used in process control where linear control laws were formulated
for plants with relatively slow time-constants. The plant of
interest for this paper is a magnetic levitation device that is
nonlinear and open-loop unstable. In this application, the
reference model of the plant is a neural network that has an
embedded nominal linear model in the network weights. The
control based on the linear model provides initial stability at the
beginning of network training. In using a neural network the
control laws are nonlinear and online adaptation of the model is
possible to capture unmodeled or time-varying dynamics.
Newton-Raphson is the minimization algorithm. Newton-Raphson
requires the calculation of the Hessian, but even with this
computational expense the low iteration rate make this a viable
algorithm for real-time control.
1. Introduction
Generalized Predictive Control (GPC) belongs to the class of
Model-Based Predictive Control (MPC) techniques and was first
introduced by Clarke and his co-workers in 1987 [1,2,3]. Linear
model predictive control has a long reputation as a powerful
control tool in industrial control processes [4,5,6]. However
nonlinear model predictive control is still viewed as an academic
tool mainly because of the difficulties associated with reliable
construction of a nonlinear model [7].
In the predictive control scheme the model is used to predict the
future behavior of the system due to both known and unknown
input effects. The accuracy of the model prediction directly
determines the quality and effectiveness of the control law and is
the primary consideration during implementation. The
construction of the model can be either derived from fundamental
principles, based on empirical data, or, as in this paper, a
combination of the two. A detailed discussion about the modeling
and identification as it applies to nonlinear model predictive
control can be found in [7].
A nonlinear model that is constructed from fundamental principals
could be globally valid over the entire input space depending on
the assumptions that are made. The derivation can be extremely
rigorous and often leads to very high order models, which can
introduce complications for real-time computation. Empirical
modeling is the process of transforming available input output data
into meaningful input output relations. The main limitation of a
model based on observations is that the prediction capability is
only valid for the region spanned by the data so nothing can be
said about the accuracy of the predictions based on extrapolations.
The magnetic levitation (MAGLEV) system presents significant
challenges for neural network modeling and predictive control.
The challenge for the neural network model is online learning for
the MAGLEV system. The challenge for the controller is to
compute real-time control laws for the MAGLEV system that has
dynamics that are considered to be relatively fast, especially for a
MBC scheme. In this paper the neural network model is
initialized with a nominal linear model. The control based on the
linear model provides initial stability at the beginning of network
training. The neural network is then allowed to learn the
unmodeled dynamics of the nonlinear plant thus combining
fundamental and empirical modeling. This paper also
demonstrates the feasibility of this NGPC implementation by
establishing real-time control at 500 Hertz while adapting the
neural network model online. All results are using a single-input
single-output system.
In the next section the Experimental Setup will be described
followed by discussions of the Neural Generalized Predictive
Control, Forming the MAGLEV Model (Fundamental Principles),
Neural Network Model, Real-time Adaptive Control, and
Conclusions and Recommendations.
2. Experimental Setup
The plant to be controlled is a magnetic levitation or MAGLEV
device. Magnetic levitation is a means of suspending an object in
space by controlling the magnetic force produced by current
flowing through a magnetic coil. The MAGLEV device used for
this work has two coils that are positioned side by side to suspend
two one-inch metal balls in the air by the electromagnetic force
due to the DC magnet above it. This device is capable of two
degrees-of-freedom (DOF), vertical translation and rotation [8].
The MAGLEV device can be used as a 1DOF single-input single-
output (SISO) system that commands only vertical translation of a
single metal ball or a 2DOF multi-input multi-output (MIMO)
system that also produces rotation through two separate vertical
translations of two metal balls connected by a nonferrous rod.
This paper presents results for the SISO 1DOF MAGLEV device
only.
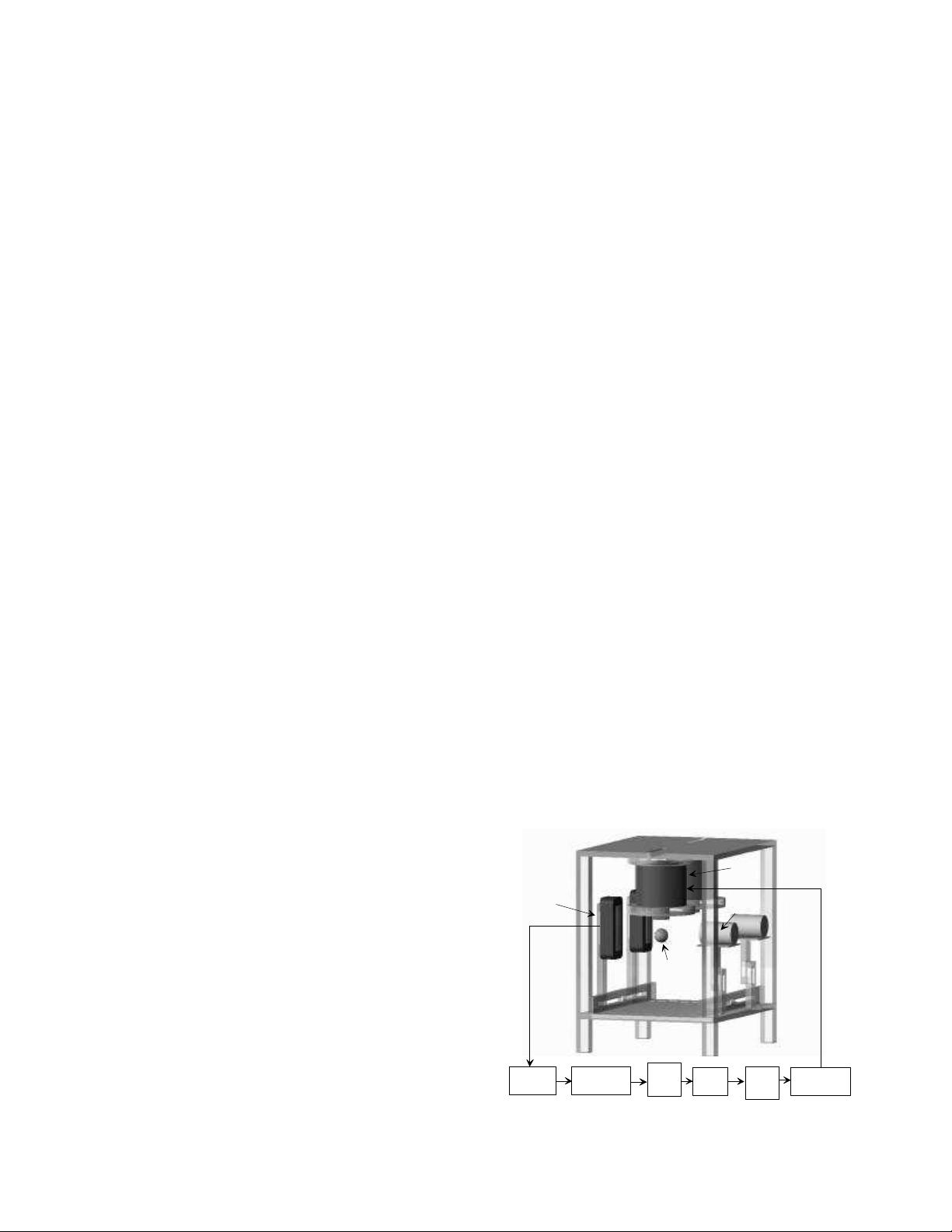
The MAGLEV device is comprised of two DC magnets, a current
drive system, two light sources, and two photosensors. Each of
the DC magnets is made of 3800 turns of gage-22 magnet wire
wrapped about a one-inch diameter low carbon steel core that is
Analog
Filters
A/D
Conversion
D/A
Conversion
Voltage
Voltage
Ball
Lamp
Convert
to
Position
Convert
to
Voltage
NGPC
Position
Sensor
Coil
Figure 1. Magnetic Levitation System
下载后可阅读完整内容,剩余4页未读,立即下载
2021-06-16 上传
2021-09-27 上传
2022-09-20 上传
2021-09-25 上传
2022-09-20 上传
2021-09-26 上传
2021-09-25 上传

smx0525
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
