STM32智能小车设计:红外探测与超声波避障
版权申诉
"本次毕业设计主要探讨了基于STM32F103微控制器的智能小车控制系统的设计与实现,该系统集成了电机驱动、红外探测、超声波避障等多个关键功能。"
STM32F103是STMicroelectronics公司生产的一款高性能、低功耗的32位微控制器,广泛应用于各种嵌入式系统设计。在这个项目中,它被选为智能小车的核心控制器,负责处理来自传感器的数据并控制小车的行为。STM32F103拥有丰富的外设接口和强大的计算能力,能够满足复杂控制任务的需求。
电机驱动电路是智能小车的动力源,通过STM32F103的PWM(脉宽调制)技术,可以精确地控制电机的转速和方向,实现小车的前进、后退、转弯等动作。PWM是一种模拟信号输出技术,通过改变脉冲宽度来调整输出电压的平均值,从而达到调速的目的。
红外探测电路用于实现小车的循迹功能。它通常由红外发射器和接收器组成,安装在小车前方,通过检测地面黑白线的反射率变化来判断小车的位置和行驶方向。当小车偏离预定轨迹时,控制器会根据红外传感器的反馈调整电机的转速和方向,使小车回到正确路径上。
超声波避障电路则利用超声波测距原理,通过发送和接收超声波脉冲,计算小车与障碍物之间的距离。在STM32F103的控制下,舵机会调整超声波发射器的角度,扩大探测范围。当检测到前方有障碍物时,小车将自动改变行驶路线,避免碰撞。
软件设计方案包括了对电机控制、循迹和避障功能的编程。在Keil集成开发环境中,开发者编写了C或C++代码,实现了这些功能。MCUISP软件用于将编译好的程序下载到STM32F103中,实现硬件与软件的结合。
这个毕业设计项目涵盖了嵌入式系统设计的多个重要环节,包括硬件电路设计、微控制器应用、传感器技术以及实时控制算法。通过这个项目,学生可以深入理解微控制器在实际工程中的应用,掌握嵌入式系统开发的基本流程和技术,为未来从事相关工作打下坚实基础。关键词:STM32;红外探测;超声波避障;PWM;电机控制。
基于 stm32 的智能小车设计
- 9 -
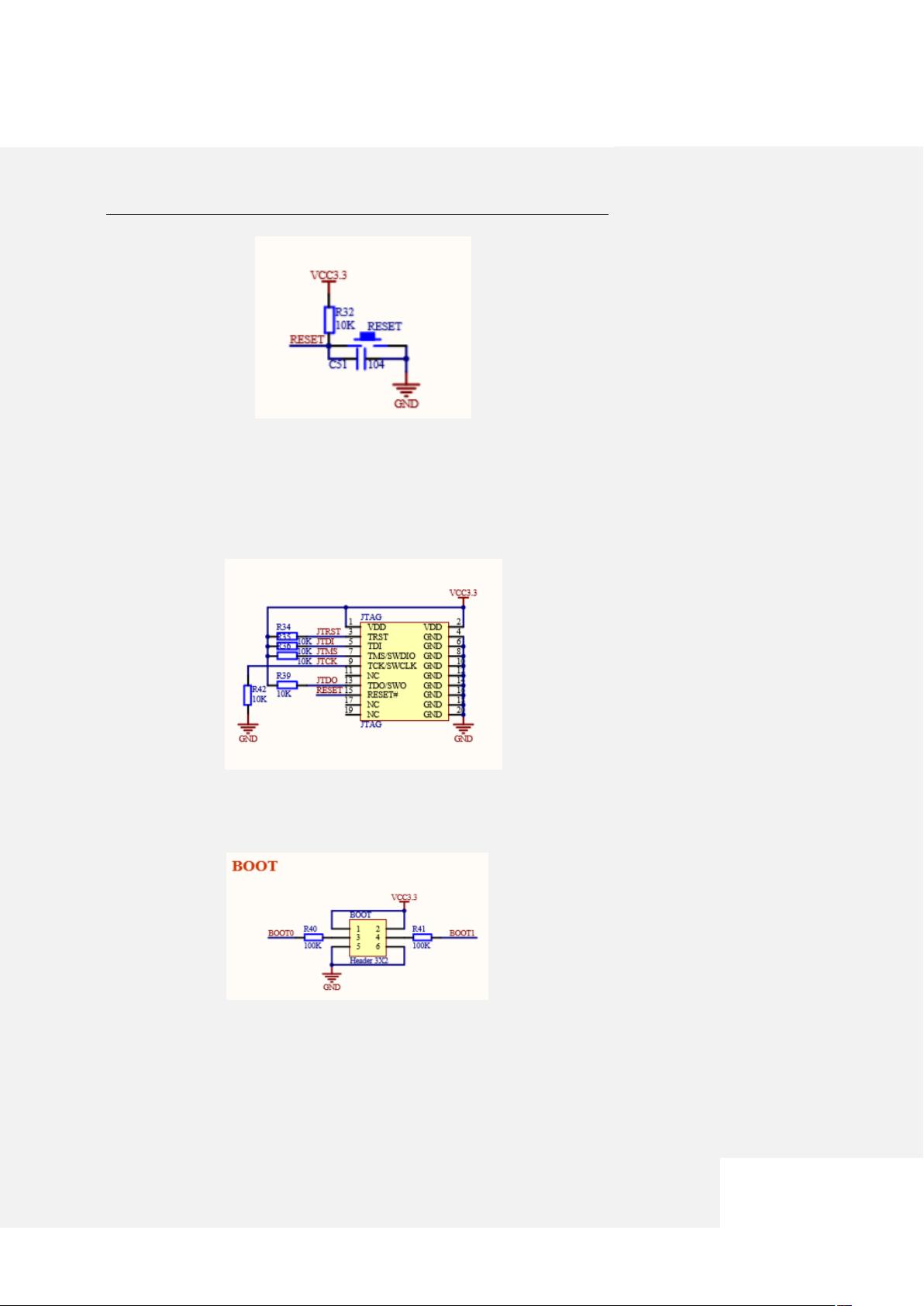
图 2.5 复位电路图
本次试验所采用的开发板为低电平复位。如图所示,当按键悬空时 RST 输入为
高电平,当按键按下时,RST 脚输入为低电平,从而电路复位。
3.JTAG 电路
JTAG 电路原理图如图 2.6 所示:
图 2.6 JAG 电路原理图
JTAG 的主要功能是使目标文件烧到核处理器中。
4.启动模式电路
启动模式电路原理图如图 2.7 所示:
图 2.7 启动模式电路原理图
通过设置 BOOT[1:0]引脚可以选择三种不同启动模式,启动模式如表 2-1 所示:
表 2-1 启动模式表

剩余46页未读,继续阅读
2022-06-11 上传
2021-09-18 上传
2023-07-02 上传
2022-06-25 上传
2022-06-16 上传
2023-06-11 上传
2023-06-11 上传

奔跑的Lunzi
- 粉丝: 419
- 资源: 370
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
