Steward动感平台体感仿真算法研究与应用
需积分: 10 34 浏览量
更新于2024-08-13
收藏 658KB PDF 举报
"Washout滤波算法是体感仿真中的关键部分,它主要用于消除不必要的高频干扰和确保低频运动的平滑性。Washout Filter由高通滤波器和低通滤波器组成,高通滤波器用于保留快速变化的信号,如高频振动,而低通滤波器则过滤掉缓慢变化的信号,确保平台的稳定运动。
高通滤波器的作用是去除低频信号,使得平台能够快速响应高频运动,如路面颠簸。其传递函数转换为差分方程的过程涉及到数字滤波理论,通常会用到Z变换或离散时间表示。通过将传递函数转换为差分方程,可以得到一个离散时间的控制算法,这个算法可以直接应用到数字控制器中,以实时控制平台的移动。
低通滤波器则用于平滑运动,主要处理车辆的平稳加速、减速和转弯等低频运动。它的传递函数转换同样涉及数字滤波技术,目的是确保平台在执行这些动作时不会过于剧烈,以保持驾驶舱的舒适性。
在具体实现中,Washout Filter的参数选择非常重要,包括截止频率、增益和延迟等,这些都需要根据平台的物理特性以及仿真需求进行精细调整。此外,文中提到的纵向加速度倾斜策略和俯仰策略是针对不同方向的运动进行优化的方法,它们确保了在各种驾驶情境下,平台能够准确模拟出相应的加速度和角度变化。
例如,纵向加速度倾斜策略可能涉及到如何将车辆的纵向加速度(沿x轴的加速度)转换为平台的倾斜角度,以便驾驶员感受到相应的加速感觉。俯仰策略则是关于如何通过平台的前后倾斜来模拟车辆的俯仰运动(即围绕垂直轴的旋转)。
实例验证是检验算法有效性的关键步骤。这通常包括实际运行平台,输入预设的车辆运动数据,观察平台的响应是否与预期相符,以及是否能提供逼真的驾驶体验。通过反复测试和调整,可以不断优化算法,提高仿真精度和驾驶感受的真实性。
"Steward动感平台体感仿真数值化算法研究"这项工作深入探讨了如何利用Washout Filter算法对六自由度动感平台进行姿态控制,以实现驾驶舱运动姿态的实时模拟。该研究不仅包含了滤波理论的应用,还涉及到了运动模拟的策略设计,对于提升驾驶模拟器的性能具有重要的实践意义。"
书书书
2013年 9月
Sep.2013
华南师范大学学报 (自然科学版)
JOURNALOFSOUTHCHINANORMALUNIVERSITY
(NATURALSCIENCEEDITION)
第 45卷第 5期
Vol.45 No.5
收稿日期:2013-01-08
基金项目:广东省科技计划项目(2012B060200013);梅州市科技计划项目(梅市科[2003]3号)
通讯作者:王石榴,高级工程师,Email:wsl9002@jyu.edu.cn.
文章编号:1000-5463(2013)05-0036-04
Steward动感平台体感仿真数值化算法研究
王石榴
(嘉应学院学报编辑部,广东梅州 514015)
摘要:为实现六自由度 Steward动感平台的姿态控制,实时模拟驾驶舱的运动姿态,选择 WashoutFilte的滤波方法作
为体感模拟算法,推导 WashoutFilter的高通、低通滤波器的传递函数转换为差分方程的算法及纵向加速度倾斜策
略、俯仰策略等,并用实例验证了算法的正确性.
关键词:体感仿真算法;Steward动感平台;数值化算法
中图分类号:TP3-05 文献标志码:A doi:10.6054/j.jscnun.2013.07.008
六自由度 Steward动感平台的运动范围是有限
的,为了在有限的空间内逼真模拟车辆的连续运动,
只有通过体感算法来实现
[1]
.体感仿真算法是将汽
车的运动参数(角速度
ω
r
、
ω
p
、
ω
h
,线速度 v
x
、v
y
、v
z
,加
速度
a
x
、a
y
、a
z
,车行 速度 v等)通 过 Washout滤波
器
[2]
进行高、低通滤波,变换成模拟器可识别的信号,
然后将这些信号传给六自由度
Steward动感平台,从
而模拟实现汽车的动作,为驾驶员提供线速度、线加
速度、角位移、角加速度等逼真的运动感觉信息
[3]
.
1 Steward动感平台体感仿真设计流程
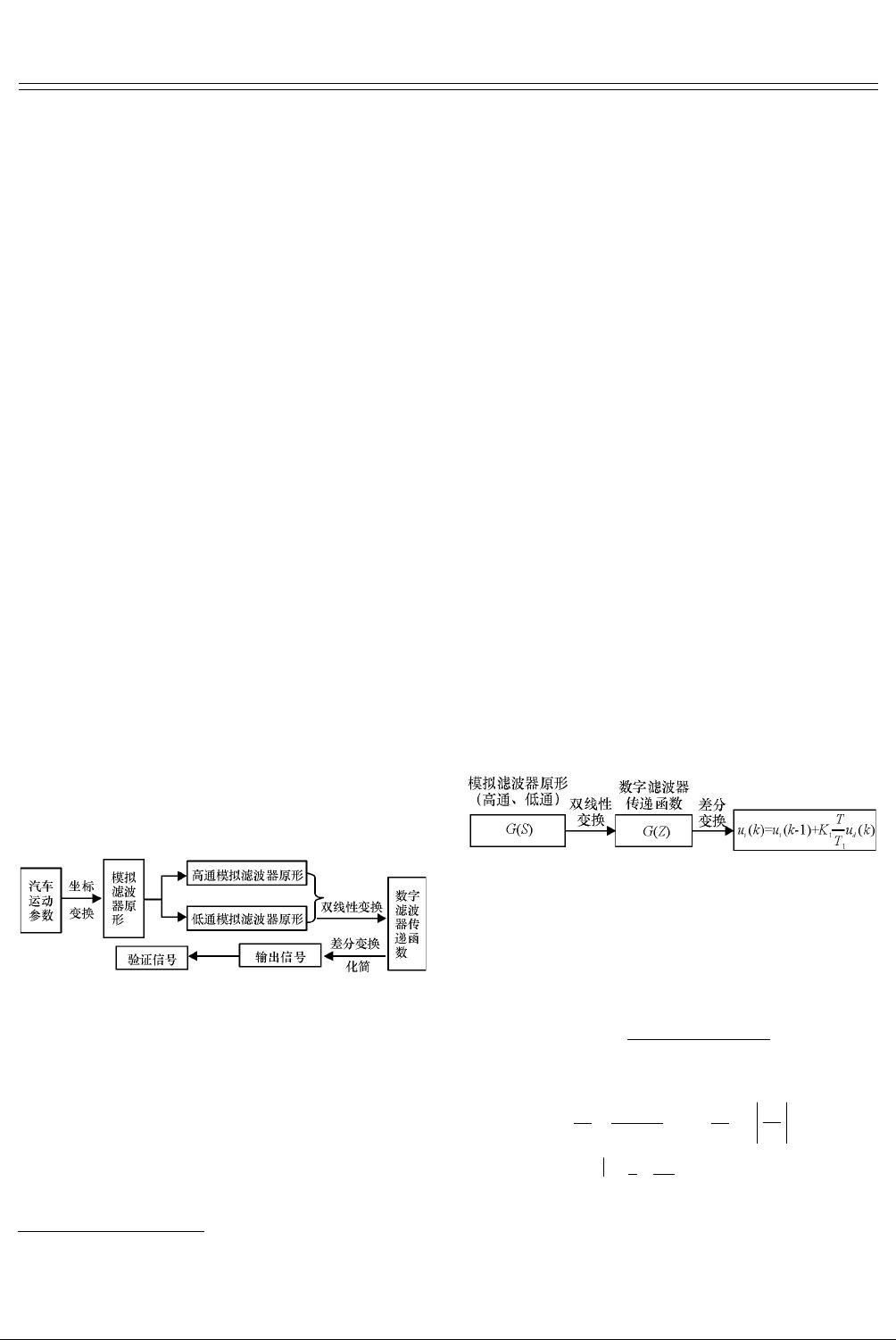
Steward动感平台体感仿真设计流程见图 1.
图 1 体感算法设计流程
Figure1 Designprocessofsomatosensoryalgorithm
体感模拟算法的设计主要是通过适当的滤波方
法,将动感平台不可能复现的车辆运动低频信号转
变为平台倾斜动作来模拟,而高频振动信号则可由
动感平台平移来模拟,并进行高、低通信号的有效
叠加,模拟实现车辆的逼真动作,给驾驶员提供逼
真感觉.
2 Steward动感平台体感仿真经典滤
波算法
2.1 算法实现原理
WashoutFilter的高通、低通滤波器是以传递函
数形式给出,需要转化为计算机可实现的差分方程
表达形式.实现的过程为采用双线性变换,将传递函
数转换为 Z变换形式,再根据 Z变换推导出系统的
差分方程表达
[4-6]
.实现过程见图 2.
图 2 模拟滤波器原形转换为差分方程的过程
Figure2 Processofanalogfilterprototypeintodifference
equation
2.2 高通滤波算法的推导过程
(1)高通模拟滤波器原形:
G(S)=
S
2
S
2
+2
ξ
hp
ω
hp
S+
ω
2
hp
.
(2)高通滤波双线性变换转换公式:
ε
=
2
T
×
1+z
-1
1-z
-1
,
Ω
=
2
T
cot
ω
2
,
即 G(Z)=G(S)
s=
2
T
×
1+z
-1
1-z
-1
.
(3)转换过程:取
ξ
=10,
下载后可阅读完整内容,剩余3页未读,立即下载
2017-03-28 上传
2019-08-11 上传
2023-09-23 上传
2023-07-28 上传
2023-05-05 上传
2023-05-25 上传
2023-09-06 上传
2024-09-10 上传
2024-09-18 上传

weixin_38648396
- 粉丝: 2
- 资源: 953
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
