五年来道路与车道检测技术综述:进展与挑战
需积分: 0 15 浏览量
更新于2024-06-30
收藏 1008KB PDF 举报
本文档《Bar Hillel等人在2014年的研究》标题为"Recent progress in road and lane detection",发表于《机器视觉与应用》杂志,卷25,页码727-745,doi:10.1007/s00138-011-0404-2,属于该期刊的特别议题论文。作者Aharon Bar Hillel、Ronen Lerner、Dan Levi和Guy Raz的研究关注了在过去十年间,尤其是过去几年中,道路和车道检测这一关键领域在高级驾驶辅助系统中的显著进展。
车道和道路检测是自动驾驶和智能交通系统的核心技术,因为它对于车辆定位、路径规划以及安全行驶至关重要。作者对近年来的研究方法进行了全面的梳理,重点关注了过去五年中各种传感器(如摄像头、雷达、激光雷达等)的不同应用和所采用的技术策略。文章将问题分解为几个基本功能模块,包括但不限于图像预处理、特征提取、目标检测、轨迹跟踪和决策支持等。
论文详细描述了针对每种功能模块可能的实现方案,并分析了它们的基础假设。例如,图像预处理阶段可能涉及去噪、图像增强和边缘检测;特征提取可能使用霍夫变换检测直线特征或深度学习提取更复杂的车道线模式;目标检测阶段可能会运用传统的模板匹配、滑动窗口或者深度学习的卷积神经网络进行车道线定位。
值得注意的是,随着深度学习的发展,许多研究人员开始利用卷积神经网络(CNN)的强大表征能力,以端到端的方式学习车道线检测,减少了手动特征工程的工作量。同时,论文还探讨了融合多种传感器数据以提高检测准确性和鲁棒性的重要性,比如将视觉信息与雷达数据相结合,以应对不同光照条件和天气变化带来的挑战。
此外,文章也讨论了不同场景下的挑战,如复杂的城市环境、夜间驾驶、极端天气条件以及动态障碍物的存在,这些都要求算法具备高度的适应性和鲁棒性。最后,论文总结了当前的研究趋势和未来可能的发展方向,强调了持续改进和创新对于推动道路和车道检测技术进一步发展的重要性。
《Recent progress in road and lane detection》这篇论文为读者提供了一个关于近年来道路和车道检测领域的综合概述,涵盖了多种传感器技术的应用、算法设计思路以及面临的挑战,对于理解和推动这一领域的研究具有很高的参考价值。
730 A. Bar Hillel et al.
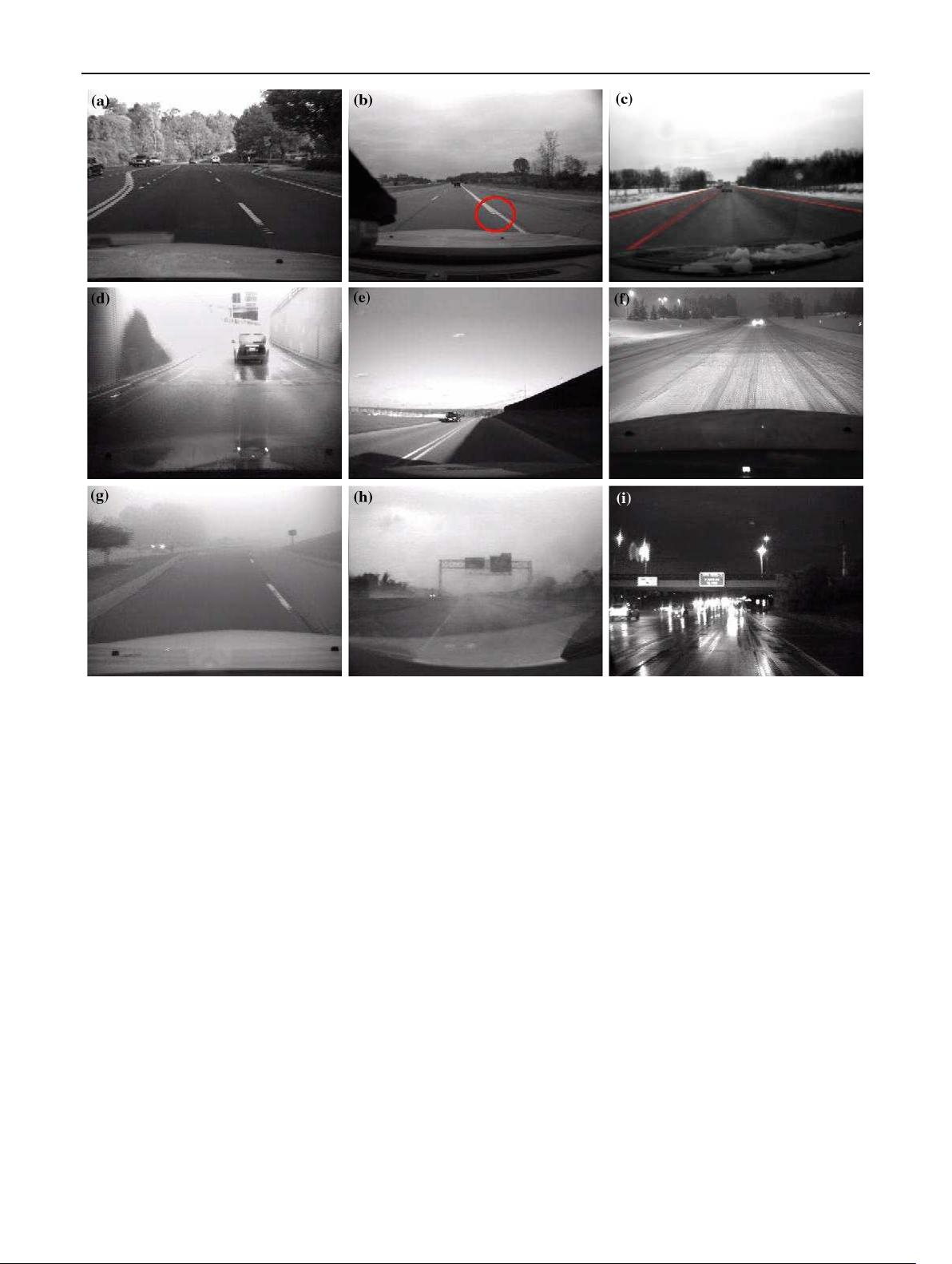
Fig. 1 Scenario diversity which road and lane detection should cope
with. Lane and road appearance diversity: a different lane marks, b the
width of the marks are changed (marked by the circle), c different lane
widths (the right lane is extremely wide due to the merge with another
lane). Image clarity issues: d saturated image’s upper part at tunnel exit,
e cast shadow on the road, f road covered with snow. Poor visibility con-
ditions: g low visibility due to fog, h low visibility due to heavy rain, i
reflections on wet road at nighttime
Lanes are typically 3.05–3.66 m wide [33], but exceptions
(about 12% in the U.S.) are frequent. The number of lanes
may vary. The road is usually straight, and curvature is
usually limited (for example the curve radius is at least
80 m for 50 KPH urban roads [34]), but exceptions exist.
– Image clarity issues While usually the road is open
and visible, there are some exceptions which cannot be
ignored. Nearby vehicles can create severe occlusions.
Shadows from nearby trees and buildings may create mis-
leading edges and texture on the road. In some cases, like
when the host vehicle comes out of a tunnel there are
abrupt changes of several orders of magnitude in the illu-
mination level, leading to over exposed image.
– Poor visibility conditions The system should operate, or
at least identify the condition and lower its confidence,
under rain, fog, haze and night conditions. Each such
condition requires another algorithmic treatment at some
processing level.
Figure 1 illustrates some of the challenging scenarios
mentioned above. Reasonable coverage for all these con-
ditions requires developing a complex system with con-
siderable engineering eff ort. Teams which tried to develop
vision-based road understanding systems in a fast manner
often gave up this modality and turned to other means [22,
23]. Most of the aforementioned difficulties have to be
faced even when implementing the most basic features
(e.g. LDW).
3 Relevant modalities
As mentioned in the previous section, several different sen-
sors or perception modalities were found useful for the task
of lane and road perception. In this section we enlist these
modalities and discuss their main characteristics and typical
use.
123
剩余18页未读,继续阅读
2021-02-26 上传
2021-04-05 上传
2021-05-09 上传
2021-03-21 上传
2021-03-17 上传
2021-02-21 上传

宏馨
- 粉丝: 25
- 资源: 293
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
