ABB机器人Profinet视觉通讯指南
40 浏览量
更新于2024-09-08
4
收藏 465KB DOCX 举报
"ABB机器人通过Profinet进行视觉系统集成"
在工业自动化领域,ABB机器人与视觉系统的集成是提升生产效率和精度的关键技术之一。Profinet是一种基于以太网的工业通信标准,广泛应用于自动化设备间的通信。本资料主要讨论了如何利用Profinet接口将ABB机器人与视觉系统(如相机)进行有效通讯,以及如何处理和解析接收到的视觉数据。
首先,让我们了解如何建立ABB机器人与视觉系统之间的socket通讯。Socket通讯是TCP/IP协议的一种实现,它允许设备间交换各种类型的数据,如字符串和字节数组。在ABB机器人的环境中,616-1 PC-INTERFACE选项是实现socket通讯的基础。机器人可以通过Service口或Wan口与视觉系统建立连接,Service口的IP通常是固定的192.168.125.1。为了进行通讯,机器人需要作为客户端(client),而视觉系统作为服务器端(server)。创建socket连接的步骤包括:
1. 新建一个包含PC-INTERFACE选项的机器人系统。
2. 使用socketClose指令关闭可能存在的旧连接。
3. 创建socket设备变量,并用socketCreate指令初始化。
4. 使用SocketConnect指令指定服务器的IP地址和端口号,建立连接。
5. 通过TPWrite指令验证连接是否成功。
6. 利用SocketSend和SocketReceive指令发送和接收数据。
当数据传输建立后,我们需要解析视觉系统发送的数据。例如,相机可能发送形如"1.23,4.56,7.890D"的字符串,其中包含了XYZ坐标轴的增量值(deltaX、deltaY、thetaZ)。解析这个字符串的方法包括:
1. 分割字符串:使用字符串函数将字符串按逗号分隔,得到各个坐标值。
2. 转换数值:将分割出的字符串转换为浮点数,赋值给对应的变量。
3. 检查结束符:确保字符串的结尾符合预期,例如这里的"0D"。
提取这些信息后,可以将它们应用到机器人的运动控制中,比如调整机器人的位置或姿态,以精确地执行任务。在实际应用中,还可能涉及到错误处理、数据校验、多线程通讯优化等复杂情况,这些都是确保机器人与视觉系统协同工作时稳定性和效率的关键。
通过Profinet接口,ABB机器人能够有效地与视觉系统进行数据交互,实现高精度的定位和拾取任务。理解并掌握socket通讯的建立和数据解析是实现这一功能的基础,对于提升智能制造水平至关重要。
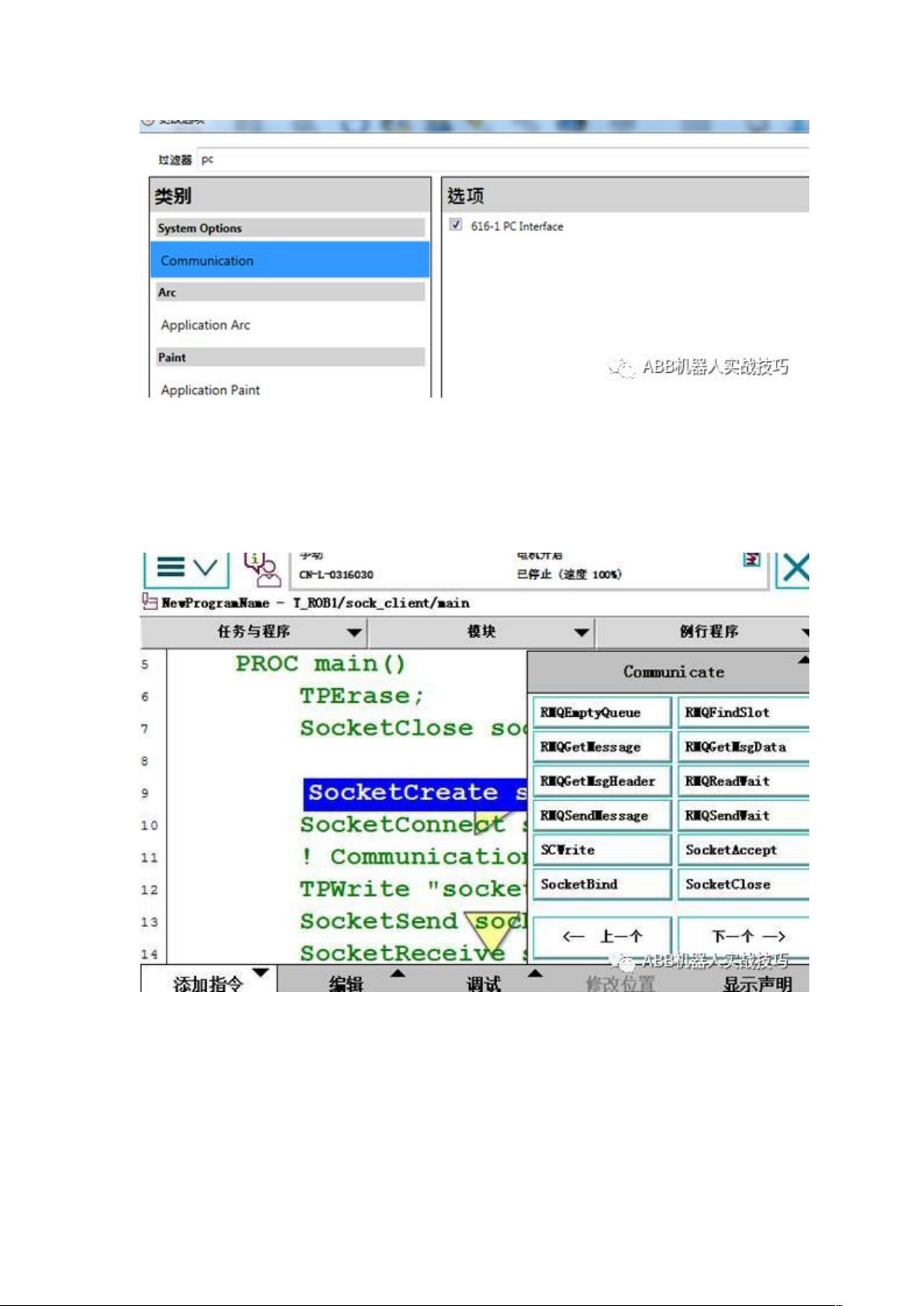
2)为了避免之前的连接没有关闭,先插入 socketclose 指令,后面的
socket1 为自己新建的 socketdev 类型的变量
3)之后插入创建连接 socketCreate
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-01-12 上传
2024-03-07 上传
136 浏览量
2009-11-14 上传
228 浏览量
2009-11-26 上传

lucunjun3333
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 墨水:LaTeX + Inkscape
- nemo-firefox-profile:向 nemo firefox 驱动程序实例添加自定义 firefox 首选项
- selenium-2.8.1.tar.gz
- 2022最新壹佰超级名片小程序 v1.1.16去授权版+前后端源码
- labox-microsystems:Labox的业务组合网站。 充当eCom的骨架
- Oncourse for LinkedIn-crx插件
- 贾维斯语音包,贾维斯语音包,贾维斯语音包
- MryLoadMoreFooter:当您的tableView滚动到底部时,加载更多数据!
- jQuery选项标签切换手机图片特效代码
- 世俗:Worldy是一项以文化为中心的活动预订,致力于将人们聚在一起
- ROS.STM32运动底盘源码.zip
- cpp-529-spr-2021:CPP 529社区分析的课程外壳
- ContactManager:React 中的简单联系人管理器 Web 应用程序
- 面试必备:WebGoat实战通关指南!一(General、Injection)
- jQuery滑动切换全屏选项卡特效代码
- selenium-2.37.2.tar.gz
