信号与系统分析:零极点图与系统稳定性
需积分: 34 130 浏览量
更新于2024-09-16
1
收藏 485KB PDF 举报
“信号与系统课程讲义,包含lec16_10.5-10.9的内容,涉及信号与系统的零极点图分析、稳定性判据和因果性判断,以及连续时间系统的微分方程解析。”
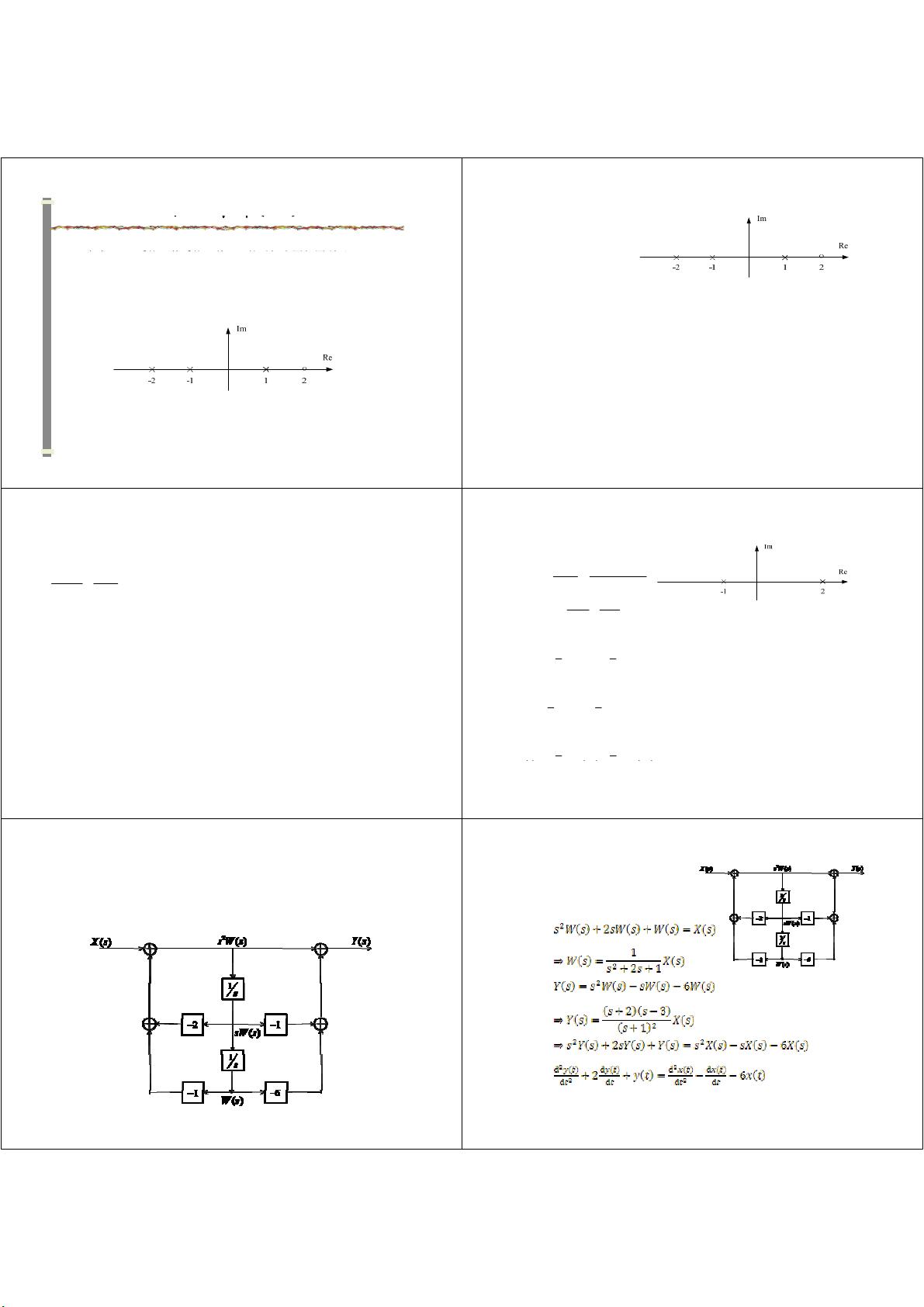
在信号与系统课程中,零极点图是分析线性时不变(LTI)系统特性的重要工具。该讲义中提到了一个LTI系统的零极点图,并要求根据图示分析相关的系统特性。零极点图是由系统函数H(s)的零点和极点在复平面上的分布构成,其中零点是H(s)的分母为零的点,极点是H(s)的分子为零的点。
题目中给出了四种可能的零极点配置,并要求判断与这些配置相关的系统是否稳定和因果。稳定性判据通常基于赫尔维茨稳定性条件,即所有极点必须位于s平面的左半部分。而因果性则要求系统函数的收敛域ROC(Region of Convergence)包含虚轴,即所有极点必须在虚轴的左侧。对于每种配置,分析如下:
1. 零点配置为{1},极点配置为{-2, -3}。这种情况下,系统是稳定的,因为所有极点都在左半平面。同时,由于ROC包含虚轴,系统也是因果的。
2. 零点配置为{2, 1},极点配置为{-1}。这个系统不稳定,因为有一个极点在右半平面。同时,由于ROC也包含了右半平面,系统是非因果的。
3. 零点配置为{1},极点配置为{-1, -2}。系统是稳定的,但不是因果的,因为虽然所有极点都在左半平面,但ROC不包含虚轴。
4. 零点配置为∅(空集),极点配置为{-1}。系统是稳定的且因果的,因为极点都在左半平面,且ROC包含虚轴。
接下来,讲义中还涉及了一个连续时间系统的微分方程问题,其中输入信号x(t)和输出信号y(t)之间的关系通过微分方程表示。拉普拉斯变换被用来求解这个系统,其中H(s)是系统的传递函数,h(t)是系统的单位阶跃响应。
对于给定的微分方程,可以解出H(s)的表达式,并进一步确定零极点位置。这里H(s)被表示为两个多项式的比,即H(s) = (s^2 + 1)/(s^3 - s),然后绘制零极点图。
根据这个传递函数,我们可以找到零点和极点的位置:零点为(-1, j, -j),极点为(0, 1, -1)。系统是稳定的,因为所有极点都在左半平面。关于因果性,由于极点0位于虚轴上,ROC必须不包括实轴上的这段,所以系统是非因果的。
对于题目中的三种情况,分别求解了系统的单位阶跃响应h(t)的拉普拉斯逆变换,以验证系统的稳定性和因果性:
1. 当系统稳定且因果时,h(t)的ROC为Re[s] > -1,对应的h(t)为e^(-t)u(t),其中u(t)是单位阶跃函数。
2. 当系统不稳定但非因果时,h(t)的ROC为Re[s] < -1,对应的h(t)为e^(2t)e^(-t)u(-t)。
3. 当系统稳定但非因果时,h(t)的ROC为Re[s] < 0,对应的h(t)为e^(t)e^(-t)u(-t)。
以上内容涵盖了信号与系统课程中的关键概念,包括零极点图分析、稳定性判据、因果性判断,以及连续时间系统微分方程的拉普拉斯变换解法。通过这些知识,学生可以理解和分析不同系统的行为特性。
作
业
讲解
(
1
4)
作讲解
(4)
考
虑
系
统
其
系
统
数
的
零
极
点
图
如
图
所
示
9.28 ( )
()
()
L
TI H s
aROC
b
考
虑
一
系
统
,
其
系
统
函
数
的
零
极
点
图
如
图
所
示
。
指出与该零极点图有关的所有可能的 。
对
于
中
所
标
定
的
每
个
给
出
有
关
的
系
统
是
否
稳
定
和
因
果
的
()
b
aROC
对
于
中
所
标
定
的
每
个
,
给
出
有
关
的
系
统
是
否
稳
定
和
因
果
的
。
1
()
ROC
解:
可
能
的
有
()
1). { } 2
2) 2 { } 1
a
ROC
es
可
能
的
有
:
2)
.
2{}1
3). 1 { } 1
4) { } 1
es
es
4)
.
{} 1
() :
1)
es
bROCjw ROC
稳定性判据 包括 轴。因果性判据: 是某个右半平面。
不
稳
定
反
因
果
1)
.
2).
3)
不
稳
定
、
反
因
果
不稳定、非因果
稳
定
非
因
果
3)
.
4).
稳
定
、
非
因
果
不稳定、因果
2
9.31 ( ) ( )
() ()
2() ()
LTI x t y t
dyt dyt
yt xt
有一连续时间 系统,其输入 和输出 由下列微分方程所关联:
2
2() ()
() () () () () ()
yt xt
dt dt
X
sYsxtyt Hs ht
设 和 是 和 的拉普拉斯变换, 是系统单位冲激响应
() () ()aHs s Hs
的拉普拉斯变换。
求 作为 的两个多项式之比,画出 的零极点图。
() ():
(1) (2) (3)
bht对下列每一种情况求
系统是稳定的; 系统是因果的; 系统既不稳定又不是因果的。
解:
由
题
意
所
得
()
() 1
()
() ( 2)( 1)
a
Ys
H
s
X
由
题
意
所
得
()
() ( 2)( 1)
1/3 1/3
() ()
21
X
ss s
bHs
ss
2
21
(1) -1 { } 2,
11
tt
ss
ROC e s
如果系统稳定, 为 因此
2
11
() ( ) ()
33
(2) { } 2,
tt
ht e u t e ut
ROC e s
如果系统因果, 为 因此
2
11
() () ()
33
tt
ht e ut e ut
2
(3)
{}
1,
1
()
3
t
R
OC e s
ht e u
如果系统既不稳定也不因果, 为 因此
1
() ()
3
t
teut
()
3
() ()
3
935
一
个因果
LTI
系统的输入
x
(
t
)
和输出
y
(
t
)
是通过下图所示方
9
.
35
个因果
LTI
系统的输入
x
(
t
)
和输出
y
(
t
)
是通过下图所示方
框图表示的。
(a)求联系y(t)和x(t)的微分方程。
(b)该系统是稳定的吗?
解:
(a)
下载后可阅读完整内容,剩余9页未读,立即下载
161 浏览量
136 浏览量
点击了解资源详情
163 浏览量
点击了解资源详情
点击了解资源详情
102 浏览量
143 浏览量
134 浏览量

jtzhuio
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- VR-Neon-Museum:VR霓虹灯博物馆
- zmk-corne
- spring-reactive-playabout:一个小玩玩的项目,尝试Spring Reactive
- jdk-18-windows最新版 java环境
- simon-says:虚幻引擎4中游戏“ Simon”的实现
- 行业文档-设计装置-隔音建筑装饰墙体.zip
- pointofix最新中文版本
- lens2d-graphics-用于多个后端的2D图形库-Rust开发
- part_1_conversion.zip
- bibilinguoFront
- 行业文档-设计装置-一种带通风系统的作业平台.zip
- rust_decimal-用纯Rust编写的十进制实现,适用于财务计算-Rust开发
- hades_yield
- dlib库的whl文件大全-适配pyhon3.6-3.10各个版本的
- python standard lib.pdf.zip
- ykt-project1107.zip
