微创外科机器人:控制方法与主从操作的革新
版权申诉
183 浏览量
更新于2024-06-27
收藏 211KB DOCX 举报
微创外科机器人控制系统是一个前沿的医疗技术,它通过独特的机械设计,显著提升了微创手术的精度和效率。这项技术的核心在于其主从操作模式,即医生作为主导者,而机器人作为执行者,两者协同工作,弥补了手动操作的局限性,比如精细操作和空间限制。
第一章绪论中阐述了研究的背景,指出随着科技的发展,微创外科手术的需求日益增长,传统的手术方式已无法满足现代医学对精准、安全和快速康复的要求。国内外对于微创外科手术机器人的研发和应用正处于快速发展阶段,尤其在远程主从操作方面,如通过远程控制技术,医生可以在远离手术现场的环境下进行精确指导,这大大减少了对手术者技能的要求,同时也降低了手术风险。
第二章详细讨论了微创外科机器人的控制方案。控制系统主要分为三种操作方式:手动控制,医生直接操作机器人的每一个动作;监督控制,医生在监控状态下对机器人进行引导;以及自动控制,通过预先编程的算法,机器人自主完成部分手术步骤。这些控制方式的灵活性使得医生可以根据手术需求和自身经验选择最适合的操作模式。
其中,机器人的控制策略尤为重要,例如位置伺服型控制,它通过精确测量和反馈来确保手术器械在目标位置的准确性。这种策略结合了机器人的高精度和医生的临床智慧,实现了手术过程的高度自动化和个性化。
此外,文中还可能探讨了如何通过传感器、图像处理技术和人工智能等先进技术,进一步提升机器人的感知能力和决策能力,使之在复杂手术环境中能够做出更为智能的选择。同时,系统的稳定性和可靠性也是关键技术研究的重点,因为任何微小的失误都可能导致手术效果的下降。
总结来说,微创外科机器人控制系统是一项集精密机械、电子控制、通信技术与医学知识于一体的综合技术,它的出现不仅推动了外科手术技术的进步,也改善了患者的治疗体验,是未来医疗领域的重要发展方向。通过深入理解并掌握这种技术,医生可以进一步提升手术效果,减少手术风险,实现医疗行业的革新。
3
置,以及手术工具运动的安全性、灵活性等诸多因素。
第二章 微创外科机器人的控制方案
2.1 主从控制系统的操作方式
2.1.1 手动控制
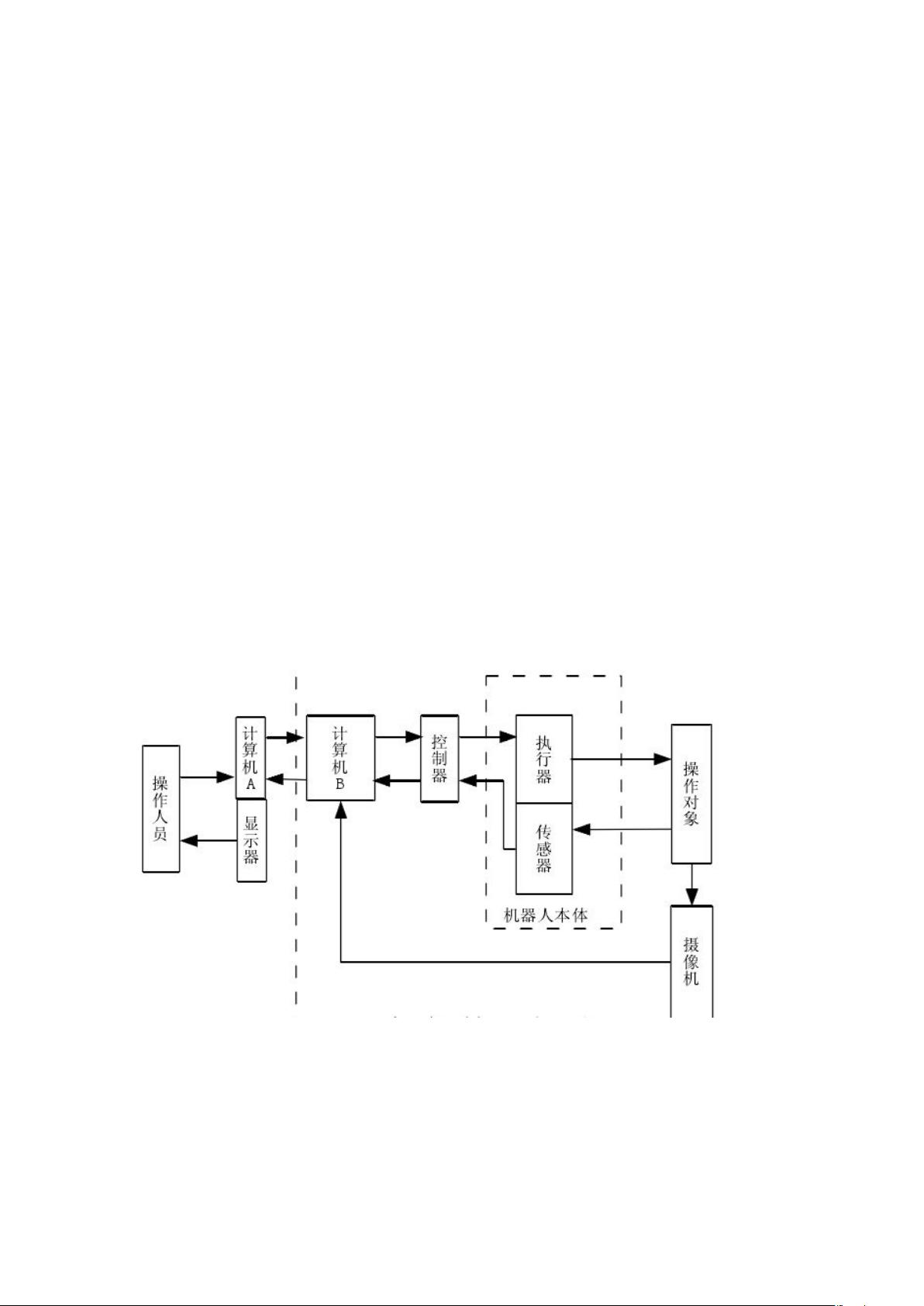
手动控制方式,见图 2.1。由操作人员、计算机 A、计算机 B、控制器、执
行器、被操作对象、传感器、摄像机和显示器组成了一个闭环控制回路。手动控
制方式中,操作人员作为整个闭环反馈控制回路的一部分而存在,完成决策、判
断、操作执行等功能。为了在空间分割,不能直视的环境下进行遥操作,手动操
作要求至少有视觉反馈,最好有力觉反馈等其他反馈。在理想情况下,操作的效
率和结果取决于操作人员的个人因素。存在延迟的情况下,遥操作机器人系统的
效率下降,遥操作的稳定性和精度很难保证。值得注意的是,手动控制中,由于
视觉反馈、力觉反馈等的局限性,操作人员的操作和判断受到的影响很大,虚拟
现实技术可以消除这一限制,从而提高手动控制的效率和精度。
图2.1 网络环境下遥操作机器人系统结构
2.1.2 监督控制
监督控制方式,见图2.2。在监控方式中,操作人员以人—机对话的方式进
剩余21页未读,继续阅读
2022-06-30 上传
2023-03-03 上传
2023-03-01 上传
2021-10-24 上传
2021-09-30 上传
2023-02-02 上传
2021-12-25 上传
2022-02-16 上传

猫一样的女子245
- 粉丝: 226
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
