相机模型与标定详解:从理论到应用
需积分: 11 5 浏览量
更新于2024-07-21
收藏 3.53MB PDF 举报
"这篇讲义深入探讨了相机模型与校准的概念,主要涵盖了相机的内在和外在参数的确定,以及这些理论在对象转移、电影工业中的应用、姿态估计和不同变换类型,如3D平移、缩放和旋转。讲义还提到了透视投影的原理,包括镜头中心和图像中心的两种透视投影模型。"
相机模型是计算机视觉领域中的核心概念,它描述了现实世界中的三维物体如何被二维图像传感器捕捉并转换为图像。这篇讲义详细阐述了相机模型的工作原理,特别是如何通过校准来获取相机的关键参数。
相机的外在参数描述了相机在三维空间中的位置和方向,即相机的3D位置和朝向。这包括了相机的平移(translation)和旋转(rotation)。在实际应用中,例如对象转移或电影制作,确定相机的外在参数至关重要,因为它决定了物体在图像中的位置和角度。
相机的内在参数则涉及到相机内部的特性,比如焦距(focal length)、像素大小等。焦距决定了相机的视野范围,而像素大小影响图像的分辨率和细节捕捉能力。这些参数在进行相机校准时需要确定,以确保图像的准确重建。
讲义中提到的对象转移应用,展示了如何将源图像中的对象转移到目标图像中,保持其形状和位置的一致性。这依赖于对相机模型的理解和精确的参数计算。
同时,讲义还讨论了姿态估计的问题,即给定一个3D模型及其2D投影图像,如何确定物体在空间中的位置和方向(翻译和旋转)。这在许多应用场景中都有用,如机器人导航、虚拟现实和增强现实。
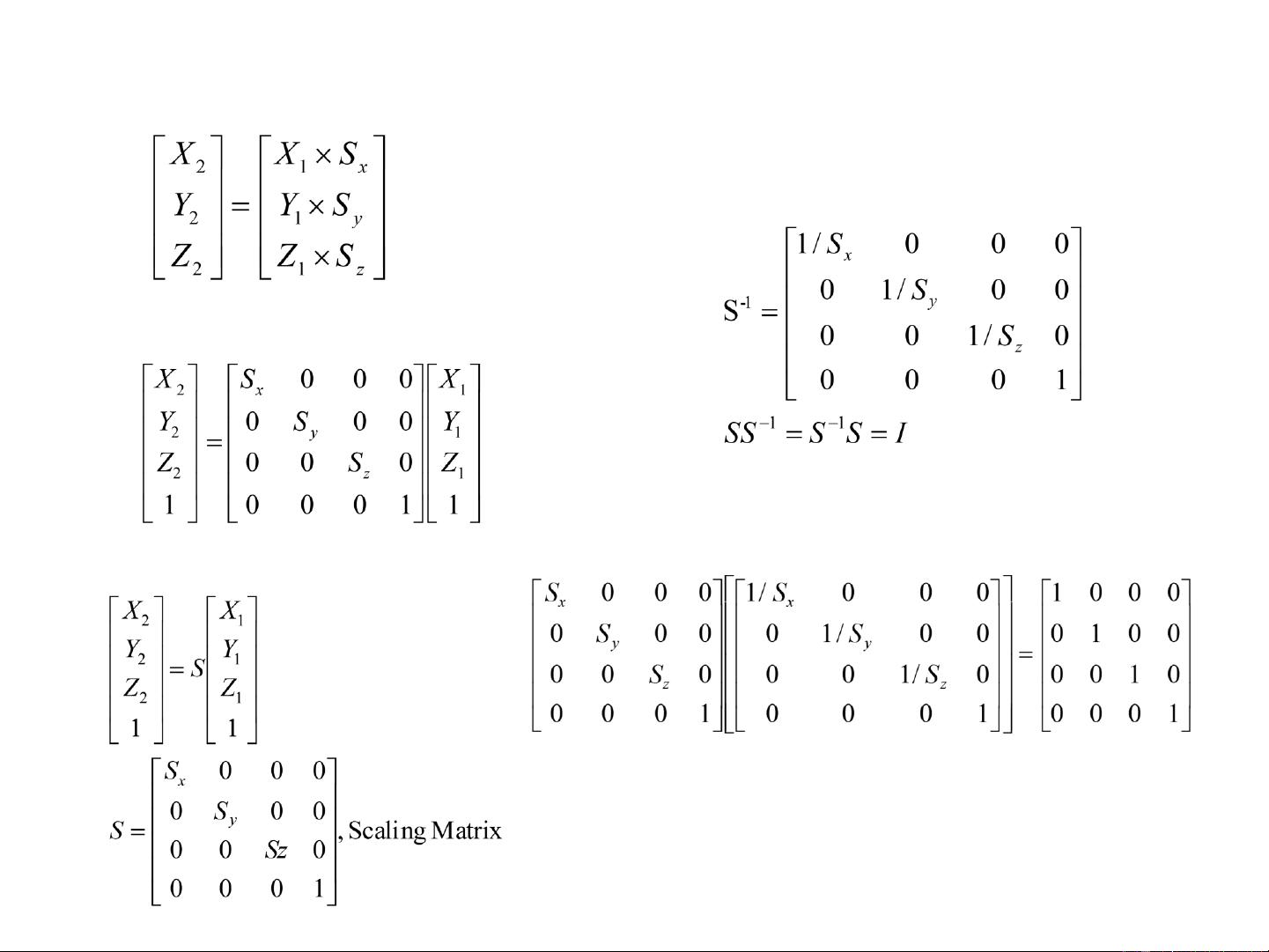
讲义还涵盖了不同的3D变换,包括3D平移、缩放和旋转。旋转矩阵是正交矩阵,当角度较小时,可以近似为欧拉角。对于任意轴的旋转,讲义介绍了更为复杂的数学表示。
透视投影是相机模型中关键的一部分,它描述了从三维空间到二维图像平面的映射。讲义分别解释了以镜头中心和图像中心为原点的两种透视投影模型,这两种模型在计算图像坐标时有所不同。
这篇讲义提供了丰富的相机模型理论知识,是学习和理解计算机视觉中相机模型和校准的宝贵资源。结合推荐的《Multiple View Geometry in Computer Vision》一书的第6.1节,读者可以更全面地掌握这个主题。
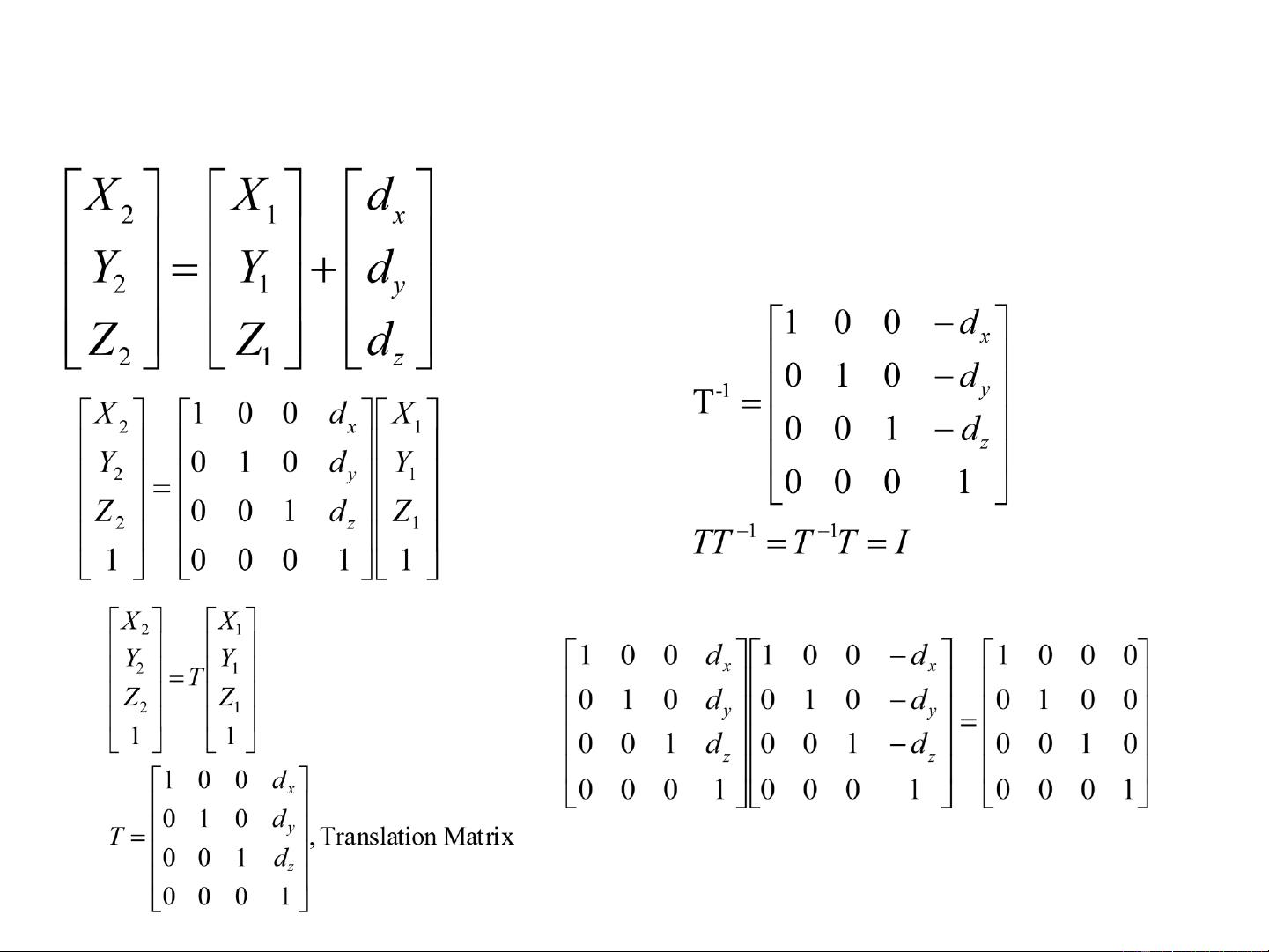
3-D Translation
剩余49页未读,继续阅读
2009-04-04 上传
2010-01-05 上传
2023-07-02 上传
2023-07-22 上传
2023-03-28 上传
2023-06-30 上传
2023-11-12 上传
2024-01-03 上传
2023-07-27 上传

GH_HOME
- 粉丝: 52
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
