工业机器人手动操纵与机械装置创建详解
版权申诉
188 浏览量
更新于2024-07-04
收藏 19.08MB PPTX 举报
工业机器人的手动操作和创建机械装置是项目2RobotStudio仿真技术中的关键部分,它涉及到实际操作和模拟应用工业机器人的能力。这个PPTX文档详细讲解了以下几个核心知识点:
1. 工业机器人手动操纵:文档首先介绍了四种手动操纵方法:
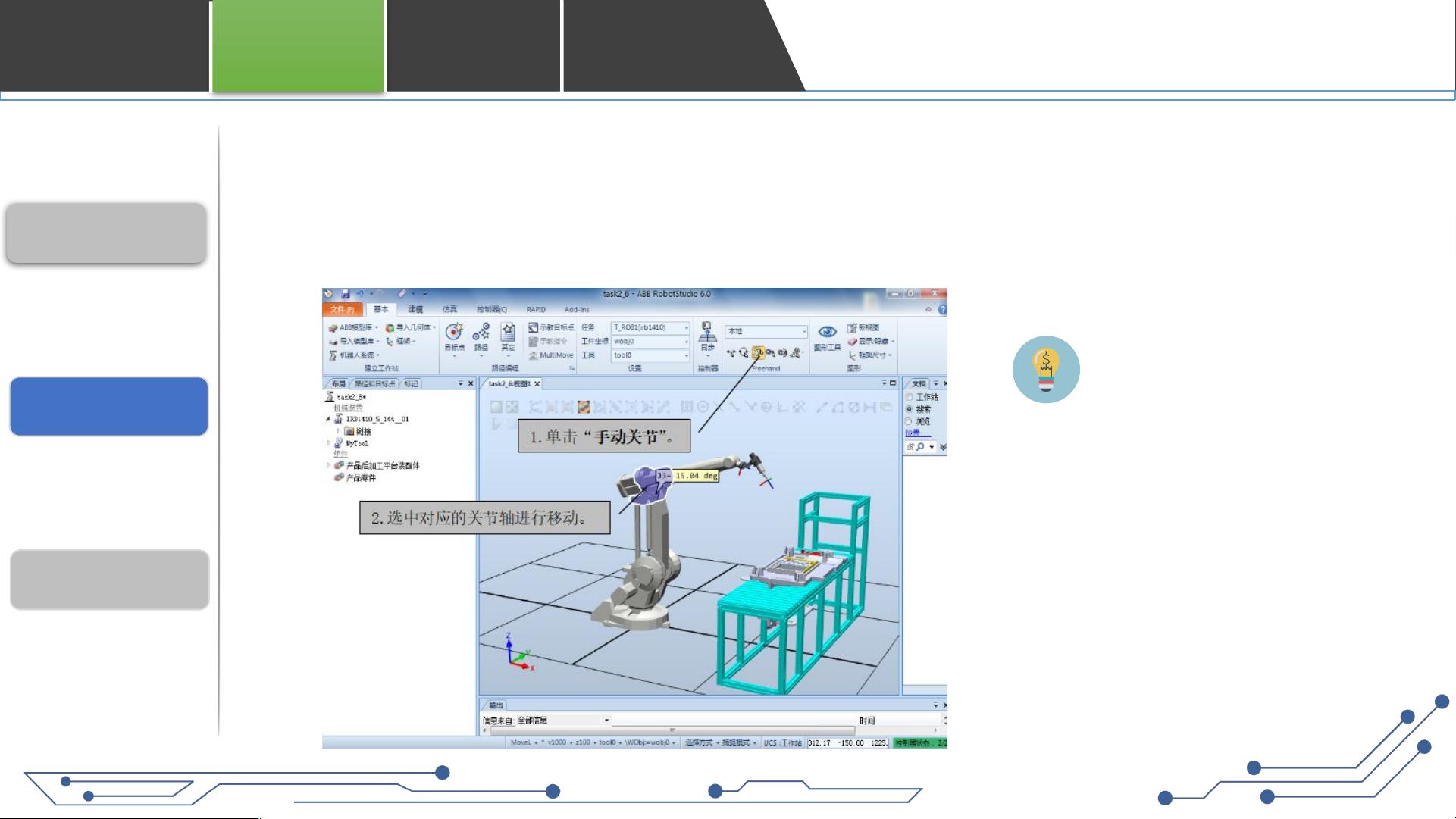
- 直接拖动:包括关节控制(按ALT键每移动10度或F键每移动0.1度)、线性运动,以及利用MyTool工具进行精确控制。
- 精确手动:分为精确手动关节和精确手动线性运动,允许用户输入关节角度或坐标值进行精确调整,移动步幅可通过Step参数设置。
2. 创建机械装置:学习者需要掌握如何设计和构建工业机器人的工作环境,如机器人上下料工作站。文档解释了工作站中周围设备如何配合机器人动作,强调除了机床外,可能存在的其他运动部件,如传送带、抓取工具等。
3. 工作站信号和信号仿真:创建工作站信号对于实现机器人的精准控制至关重要,文档指导用户如何设置信号,并通过仿真功能进行设定,确保信号传递的准确性和效率。
4. 离线编程与仿真:文档还涵盖了离线编程的基础知识,目标是让学生能够根据实际需求灵活选择合适的操纵方法,通过仿真预览和优化工业机器人的动作路径,减少现场调试的时间和成本。
5. 工作日志管理:最后,文档提到了工作日志的管理和设置,确保与示教器上的设置保持一致,便于追踪和分析机器人操作记录。
通过这份PPTX文档,学习者不仅可以了解工业机器人的基本操作技巧,还能掌握如何在RobotStudio中进行高效且安全的机械装置设计,提升离线编程的技能,为实际的生产线操作打下坚实基础。
知识应用
知识导图
知识讲解
课堂导入 新知学习 训练巩固 评价总结
项目 2 RobotStudio 仿真技术知识储
备
三、建立工作站信号和日志管理
05
01
02
03
04
添加通信 IO 板
或者通信协议
设置板卡属性或
者通信协议属性
添加信号
设置信号属性
系统重启
(热启动)
需要设置的项目与
在示教器上设置内
容相同
任务 2-7 创建机械装置
剩余42页未读,继续阅读
2021-10-04 上传
2021-11-17 上传
2021-10-02 上传
2023-08-14 上传
2021-10-07 上传

知识世界
- 粉丝: 375
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vue3Firebase
- Amazon Data Scraper - Price, Product, Sales-crx插件
- 应用做事
- pandas_flavor-0.3.0.tar.gz
- Psd2Xcode-Xample:Psd2Xcode的示例文件和项目
- tcp_server_client:精简的C ++ TCP客户端服务器
- 【IT十八掌徐培成】计算机基础第01天-02.进制转换-cpu亲和力设置.zip
- SirinlerProje2
- QR马上读-crx插件
- 体内DNA随机动力学
- LostIRC-开源
- 满足您所有开发需求的简短Python代码段-Python开发
- scala-jsonschema:Scala JSON模式
- 155386sy.github.io
- OraNetted-开源
- pandas_flavor-0.2.0.tar.gz
