川崎机器人E系列外部IO接线与信号配置手册
需积分: 10 186 浏览量
更新于2024-07-15
收藏 1.08MB PDF 举报
"90204-1023DC外部IO手册.pdf 是川崎机器人提供的E系列外部IO接线和信号配置指南,涵盖了多种E系列机器人的接口使用和安全注意事项。"
这篇手册由川崎重工业株式会社出版,主要针对E系列川崎机器人的外部输入/输出(I/O)接口进行详细解释,旨在帮助用户更好地理解和配置机器人与外部设备之间的通信。E系列控制器包括多种型号,适应不同地区的标准,如日本、北美和欧洲的规格,以及特定的防爆规格。
手册的前言强调了以下几点:
1. 手册内容不构成对整个应用系统的全面担保,川崎公司对因使用该系统可能引起的事故、损害或知识产权问题不承担责任。
2. 建议所有涉及机器人操作、示教、维护和修理的人员参加川崎公司的专业培训课程。
3. 川崎公司保留随时修改手册内容的权利,未经许可,不得复制或重印手册。
4. 手册应妥善保管,当机器人转移或转售时,应随机器一同提供,如有丢失或严重损坏,需联系川崎公司。
5. 本手册适用于一系列E系列机器人型号,包括E10到E97等不同规格和防爆版本。
手册中使用了不同的安全符号来突出重要信息:
- 注意([注意]):提示关于机器人规格、处理、示教、操作和维护的注意事项。
- 危险(!):表示如果不遵循指示,可能会立即导致伤害或死亡。
- 警告(!):警告不遵守指示可能导致人身伤害和/或机械损伤。
- 小心(!):提醒用户手册中的信息可能存在不确定性,因此在实际操作时需谨慎对待。
手册的具体内容可能包括但不限于:
- E系列控制器的外部I/O端口布局和功能。
- 各种输入和输出信号的定义、类型和配置方法。
- 连接控制器与外部设备的步骤和接线图。
- 安全操作规程,包括预防措施和应急响应指南。
- 实例和图示,帮助用户理解如何正确设置和使用外部I/O。
- 可能存在的限制和已知问题,以及解决方法。
通过这个手册,用户能够深入了解川崎E系列机器人的外部I/O功能,从而实现安全、高效地集成和控制机器人系统。对于机器人编程、自动化生产线设计和维护人员来说,这是一份至关重要的参考资料。
E 系列控制器 1. 外部 I/O 信号的类型
川崎机器人 外部 I/O 手册
13
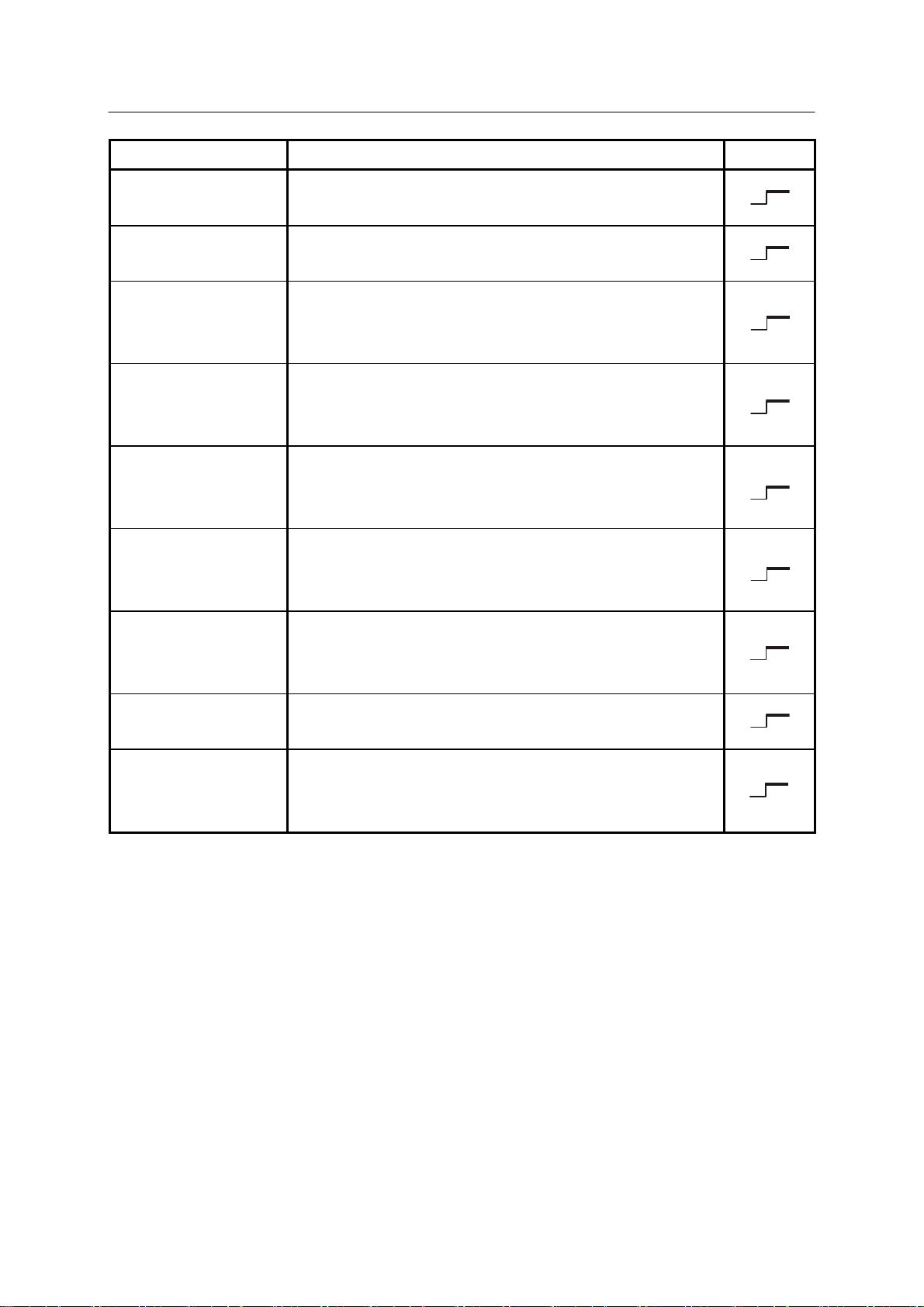
信号名称 功能 信号类型
步骤编号
(Step number)
输出当前选择的程序的步骤编号。
示教销定开
(TEACH LOCK ON)
在示教销开时,为输出信号。
自动保存警告输出
(AUTO SAVE
WARNING)
在自动保存期间,发生错误时,为输出信号。
伺服准备状态
(SERVO READY
STATUS)
在示教模式下,当伺服系统既没发生错误,也没做紧
急停止时,为输出信号。
PC 程序执行中
(External PC
program executing)
当执行一个 PC 程序时,为输出信号。
紧急停止
(Under emergency
stop)
在紧急停止时,为输出信号。
空运行执行
(Executing dry
run)
在空运行模式下,为输出信号。
暂停模式
(Hold Mode)
在暂停模式下,为输出信号。(包括外部暂停模式)
安全围栏开
(Safety Fence
Opened)
在再现模式下,当着时,为输出信号。

剩余85页未读,继续阅读
2019-09-03 上传
2021-01-21 上传
2021-09-24 上传
2021-09-24 上传
2021-09-24 上传
2021-09-24 上传
2019-10-16 上传
2021-09-24 上传

weixin_46098606
- 粉丝: 1
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
