伺服驱动基础:YASKAWA伺服系统解析
需积分: 17 42 浏览量
更新于2024-08-02
收藏 880KB PDF 举报
"伺服驱动基础课程"
本课程详细介绍了伺服驱动的基础知识,由安川电机(上海)有限公司提供,旨在帮助学员在学习Σ-Ⅱ系列伺服驱动器之前,建立起对伺服驱动系统的全面理解。
伺服驱动系统是自动化控制的重要组成部分,其核心目标是实现对目标值的精确控制。它通常包括一个反馈回路,由目标值发生装置、伺服驱动、机械执行机构和检测设备组成。伺服驱动系统的主要构成要素如下:
1.1 伺服的定义与构成要素
伺服系统定义为能够根据目标值的变化快速响应并精确控制输出的控制系统。构成要素包括:
- 目标值:系统期望达到的状态。
- 发生装置:设定和发送目标值的设备。
- 伺服驱动:执行控制计算并驱动机械运动的部分。
- 机械:由伺服驱动控制的执行机构。
- 反馈回路:通过检测实际输出并与目标值比较来调整控制信号的环节。
1.2 伺服驱动的构成
伺服驱动主要由以下部分组成:
- 整流部:将交流电源转换为直流电。
- 逆变部:将直流电转换为交流电以驱动电机。
- 电源部:为整个系统提供电源。
- 控制部:包括电流控制部、速度控制部和位置控制部,负责处理指令信号、反馈信息,并计算电机所需的电流、速度和位置。
- 编码器:检测电机的电气角度、速度和负载位置,为反馈控制提供关键数据。
1.2.1 控制部的构成
- 速度控制部:根据位置和电流反馈调整电机速度。
- 位置控制部:接收位置决定指令,通常是脉冲列,通过计数器进行位置计算,确保输入脉冲与反馈脉冲匹配。
- 电流控制部:形成电流环,确保电机得到正确电流以产生所需转矩。
1.2.2 位置控制部的构成
位置控制部通过计数器(偏差计数器)管理输入和反馈脉冲,当输入脉冲与反馈脉冲数量一致时,完成位置确定。
1.2.3 速度控制部的构成
速度控制部包括积分器,用于消除摩擦力并使电机按照指令速度运行。无积分器时,系统可能无法有效克服负载摩擦。
伺服驱动系统是一个复杂的闭环控制网络,其性能评价指标包括精度、响应速度和稳定性等。通过对各个部分的深入理解和优化,可以实现高效率、高精度的自动化控制。通过本课程的学习,学员将能够掌握伺服驱动的基本原理和应用,为后续的伺服驱动器操作和维护奠定坚实基础。
YASKAWA
Quality and Beauty
9
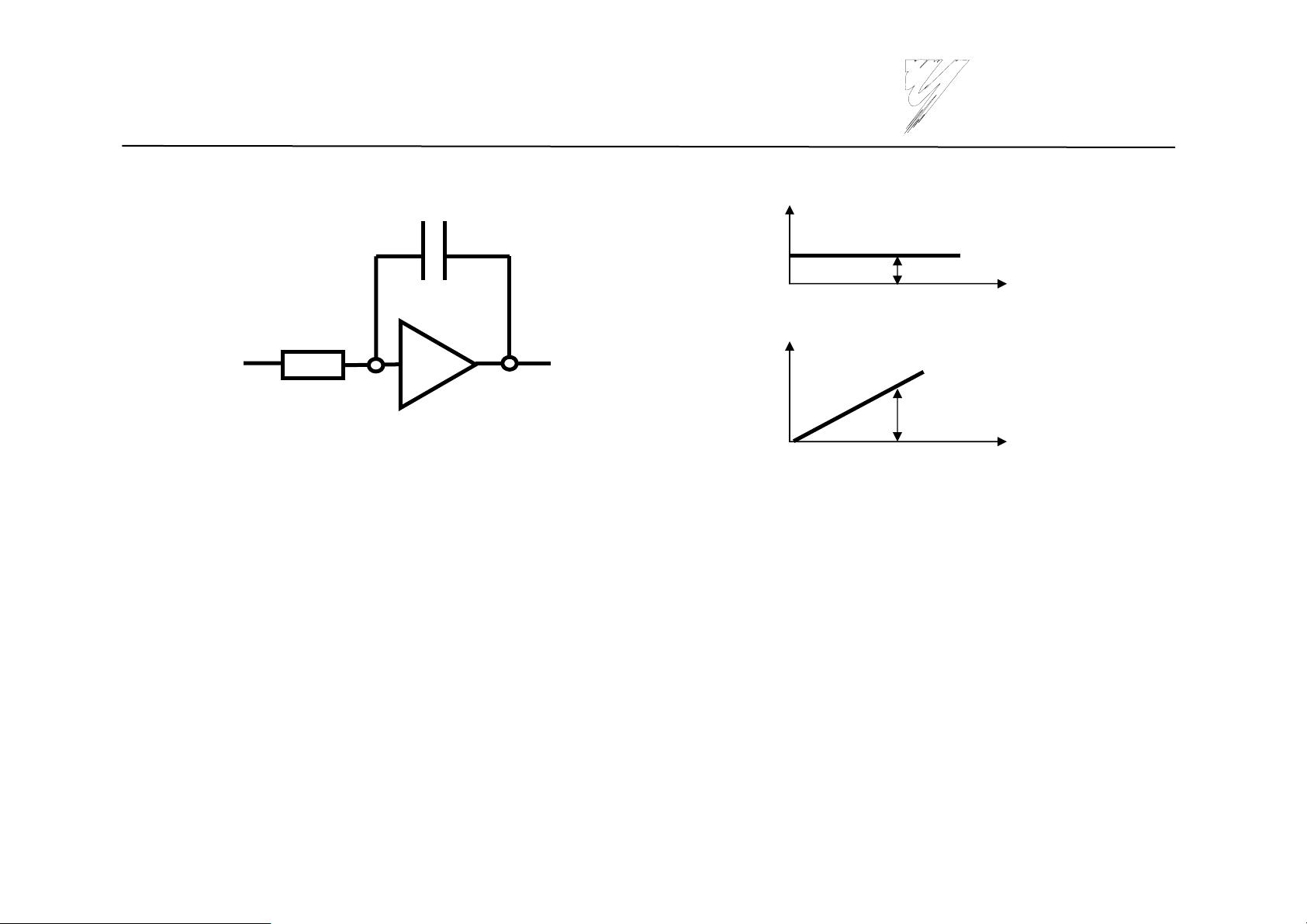
X
Yi
Ki
Yi=Ki・∫Xdt
t
t
Yi
x
y
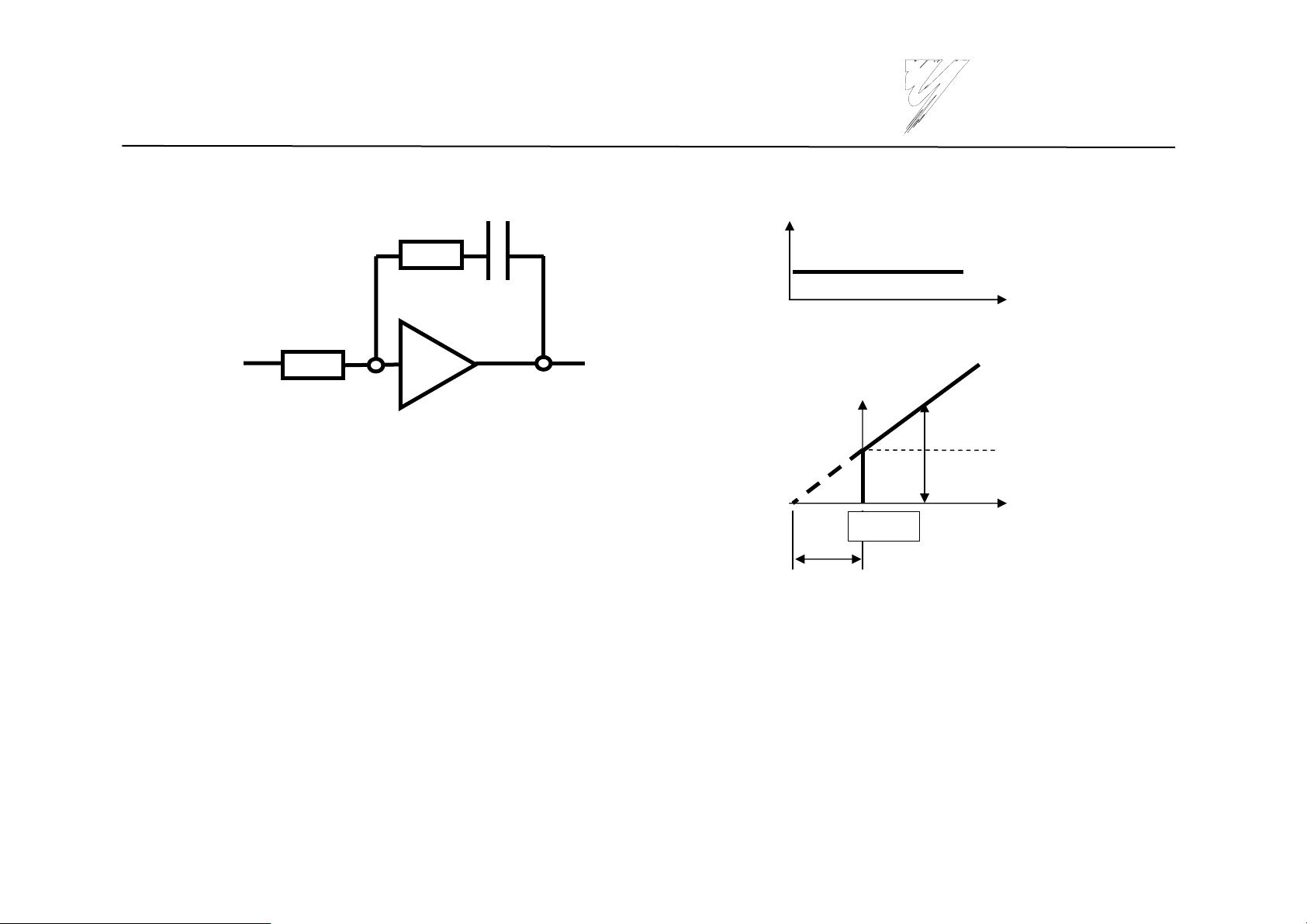
1.2.5 積分動作(I動作)
X
・偏差变小、负荷动作越困难
偏差微量存在,这个量就称为残留偏差(偏移)。
・即使是小偏差,也可以积累成大的操作量。直到偏差成为0,
负荷才可以运作。
T=0
T=0
剩余50页未读,继续阅读
2023-10-18 上传
2023-07-30 上传
2024-08-10 上传
2024-06-27 上传
2023-07-22 上传
2023-06-25 上传
2023-07-03 上传
2024-09-17 上传
2024-09-17 上传

jzjforever_1
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
