深度学习驱动的点云配准:技术进展与展望
130 浏览量
更新于2024-06-17
收藏 1.48MB PDF 举报
"这篇文章是关于基于深度学习的点云配准技术的综述,由张志远、戴玉超和孙家代撰写,发表在2020年虚拟现实智能硬件期刊的第3期上。文章探讨了点云配准在计算机视觉和机器人技术中的重要性,特别是在3D重建、SLAM和自动驾驶等领域。作者将现有的深度学习点云配准方法分为基于对应关系和无对应关系的方法,并分析了不同方法的优缺点。他们还提出了一种系统框架,并指出了未来的研究方向。关键词包括综述、点云配准、深度学习和图神经网络。"
点云配准是计算机视觉和机器人领域中的核心问题,它涉及寻找最佳的刚性变换以使两个点云对齐。在3D重建中,准确的点云配准有助于构建真实世界的三维模型;在SLAM(Simultaneous Localization And Mapping)中,它帮助机器人定位并构建环境地图;在自动驾驶中,配准有助于车辆理解周围环境,确保安全行驶。
深度学习近年来在高级视觉任务中的突破性成就催生了多种点云配准方法。这些方法通常包含四个主要模块:特征提取器、匹配、离群值拒绝和运动估计。特征提取器利用深度神经网络从原始点云数据中提取有意义的特征;匹配模块寻找对应点以确定变换;离群值拒绝则用于识别并排除可能引入误差的数据点;运动估计模块根据匹配的点对计算出最佳的刚性变换。
文章中,作者将基于深度学习的点云配准方法分为两类:基于对应关系和无对应关系。前者依赖于找到精确的匹配点,而后者则不依赖于明确的对应关系,适用于匹配不确定或噪声较大的情况。尽管深度学习方法在点云配准上取得了显著进步,但它们也存在挑战,如需要大量标注数据、计算复杂度高以及对噪声敏感等。
作者提出了一种系统而紧凑的框架,总结了现有方法,并讨论了未来的研究方向,可能包括提高配准精度、降低对大数据集的依赖、实时性能优化以及应对非刚性变形的配准问题。此外,图神经网络(GNNs)作为一种新兴的深度学习架构,有可能在点云处理中发挥重要作用,因为它们能有效地处理非欧几里得数据结构,这在点云数据中尤为常见。
这篇综述为读者提供了深入理解基于深度学习的点云配准的途径,对于研究人员和从业人员来说,是了解当前技术状态和未来趋势的重要参考。
227
Zhiyuan ZHANG et al:Deep learning based point cloud registration:an
overview
F
图
5
基于深度学习的点云配准方法分类。
其基于显式对应来估计刚性运动参数。基于学习的方法改进了传统的框架,该框架由四个部分组
成:特征提取器,匹配,离群点拒绝和运动估计。除了这两类,一些额外的特殊细化机制,提出了
提高性能,包括迭代方法和多视图约束。最后介绍了部分点云的配准问题。
3.1
无对应方法
无对应方法的关键是通过搜索两个输入点云的全局特征之间的差异来回归刚体运动参数。关键阶段
是全局特征摘要,它必须对姿态敏感。另一个重要的阶段是如何从这样的差异中求解运动参数,根
据是否基于深度学习分为两类。
在PointNetLK
[56]
中,输入点云X和Y的全局特征,表示为
Φ
X和
Φ
,
由PointNet-Cla提取
[23]
网络然后提出了求解R和t的求导理论。最后,
G
e
s
t
-
1
G
g
t
-
I
4
它是损失函数,而
G
是预定义,
G
是
真实的。 在
这种
方法中,
PointNet
[23]
网络是易受影响的
姿势,这成为一个巨大的优势, 配准任务,并且雅可比矩阵可以通过有限差分梯度计算来近
似。这种方法允许应用计算高效的逆组合
Lucas-Kanade
算法
[56]
。
最近提出的一种方法,特征度量配准
[57]
,继承了
PointNetLK
的框架,通过最小化特征度量来实施
优化。该模型侧重于一个特征提取器,它利用了编码器
-
解码器机制。对于点云的两个旋转副本的原
理,编码器模块应该生成不同的特征,并且解码器可以将不同的特征恢复为其对应的旋转副本。该
模型使用半监督或无监督方法进行训练,这需要有限的或不需要注册标签数据。
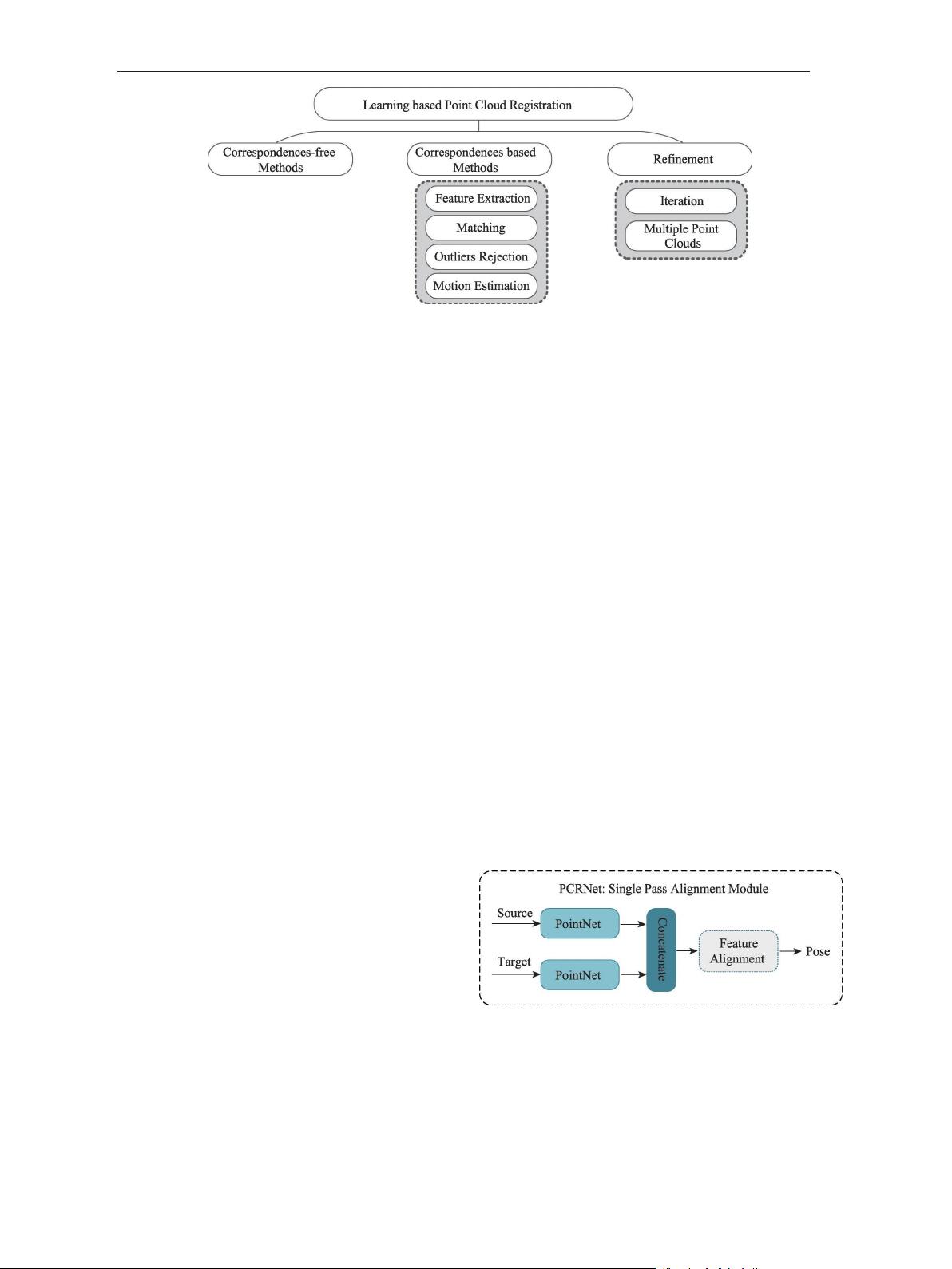
类似的工作
PCRNet
[58]
也利用
PointNet
[23]
来提取
全局特征。框架如图
6
所示。然而,在特征对齐
模块中,使用数据驱动技术。首先,连接两个
全局要素,然后沿其应用五个完全连接的图层
输出层的尺寸为
图
6 PCRNet
的核心框架
剩余28页未读,继续阅读
205 浏览量
271 浏览量
点击了解资源详情
2024-11-07 上传
233 浏览量
205 浏览量
832 浏览量
145 浏览量
2025-01-09 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 彻底清除Office2003 安装残留问题
- Swift动画分类:深度利用CALayer实现
- Swift动画粒子系统:打造动态彗星效果
- 内存SPDTool:性能超频与配置新境界
- 使用JavaScript通过IP自动定位城市信息方法
- MPU6050官方英文资料包:产品规格与开发指南
- 全方位技术项目源码资源包下载与学习指南
- 全新蓝色卫浴网站管理系统模板介绍
- 使用Python进行Tkinter可视化开发的简易指南
- Go语言绑定Qt工具goqtuic的安装与使用指南
- 基于意见目标与词的情感分析研究与实践
- 如何制作精美的HTML网页模板
- Ruby开发中Better Errors提高Rack应用错误页面体验
- FusionMaps for Flex:多种开发环境下的应用指南
- reverse-theme:Emacs的逆向颜色主题介绍与安装
- Ant 1.2.6版本压缩包的下载指南
