ROS2实时系统:实时计算与最佳实践
需积分: 37 39 浏览量
更新于2024-07-19
1
收藏 1.49MB PDF 举报
"Realtime ROS2: 实时控制与先进功能介绍"
在现代机器人操作系统(Robot Operating System, ROS)的最新迭代——ROS2中,实时性成为了一个关键特性。本篇PPT文档由Jackie Kay和Adolfo Rodriguez Tsouroukdissian共同呈现,着重探讨了实时计算在ROS2中的应用和设计。他们以一个激励人心的示例为出发点,展示了ROS2如何支持实时系统的构建。
首先,他们通过一个实际场景来阐明动机,比如自动驾驶汽车中的传感器数据处理,其中传感器块、决策逻辑块以及执行器块构成一个动态变化的系统。在这个例子中,某些块(如摄像头和雷达数据处理)需要满足严格的实时性能要求,确保数据采集和处理能在预定的时间内完成,这对于系统的整体性能至关重要。
文档深入分析了实时控制在ROS2设计中的考虑因素和最佳实践。它强调了在ROS2中,组件可以灵活组合成层次结构,同时区分出那些对时间敏感的部分。这种模块化的设计允许开发者根据需求选择实时性能,而不影响整个系统的扩展性。
对比ROS1,ROS2在实时性能上有所提升,尤其是在消息传递机制、调度策略以及内存管理方面进行了优化。ros_control库在ROS2中也得到了增强,以更好地支持实时控制任务,比如关节伺服控制或位置控制。
演示部分展示了如何利用ROS2实现一个具备实时特性的复杂系统,包括系统架构的变化适应性和动态任务调度。实时性体现在系统能够处理不断变化的环境和任务,确保关键操作的及时响应。
总结来说,这篇PPT深入探讨了ROS2作为实时系统的优势,提供了实时控制的实践指导,以及与先前版本的比较。对于开发和部署依赖于实时性能的机器人应用,理解这些核心概念和技术是至关重要的。通过学习和实践,开发人员能够充分利用ROS2的潜力,创建高效且可靠的实时机器人系统。

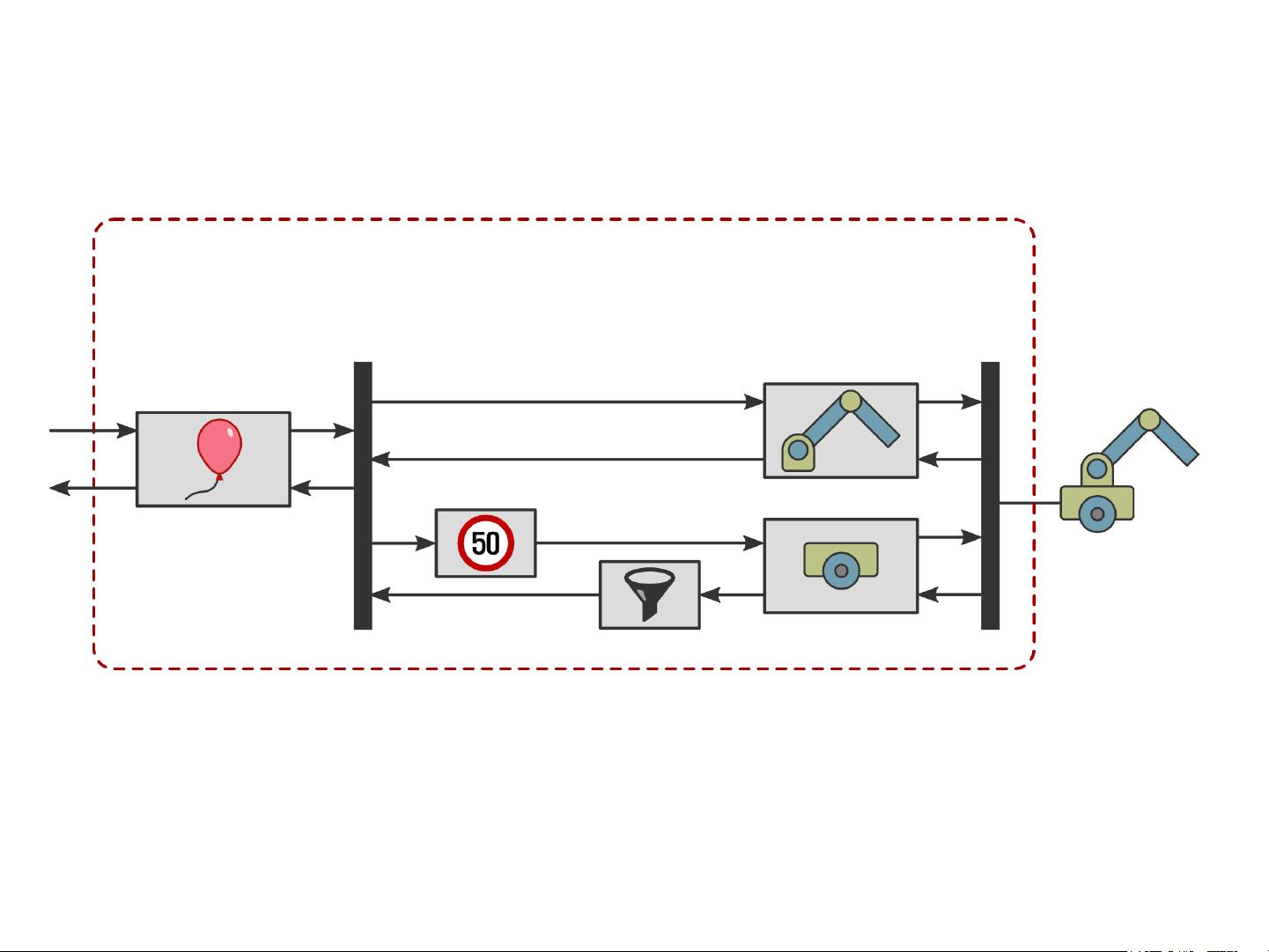
A motivating example
– Blocks can be composed by other blocks
– Some blocks are subject to real-time constraints
– System topology can change at runtime
9

剩余52页未读,继续阅读
2020-03-29 上传
2021-05-16 上传
2021-05-11 上传
2021-05-16 上传
2021-05-30 上传
2021-07-08 上传
2022-07-12 上传
2021-02-05 上传

bdsbcjc
- 粉丝: 0
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
