离散化设计:数字PID控制器的Z变换与比较
版权申诉
92 浏览量
更新于2024-07-06
收藏 1.16MB PPTX 举报
在"数字PID算法分析.pptx"文档中,主要探讨了数字控制器设计中的常规方法,特别是针对模拟控制器离散化的不同技术。以下是详细的内容概要:
第三章着重于常规数字控制器的设计,其中离散化设计是关键步骤。首先,为了将连续系统转化为数字控制系统,需要采用适当的离散化方法,如图示的保持器和被控对象的离散化,这使得整个系统能在计算机上实现控制。模拟化设计虽然能利用成熟的理论和方法,但离散化过程中可能会导致系统动态特性随采样周期变化,可能导致闭环系统不稳定。
离散化设计通常使用Z变换和离散状态空间分析法,这种方法具有普遍性和稳定性优势,常被视为精确设计手段。然而,其精确性只适用于线性范围及采样点,且在离散化模拟控制器时,必须确保主要特性如极点、零点、频带宽度、增益裕度等能在一定程度上保持。
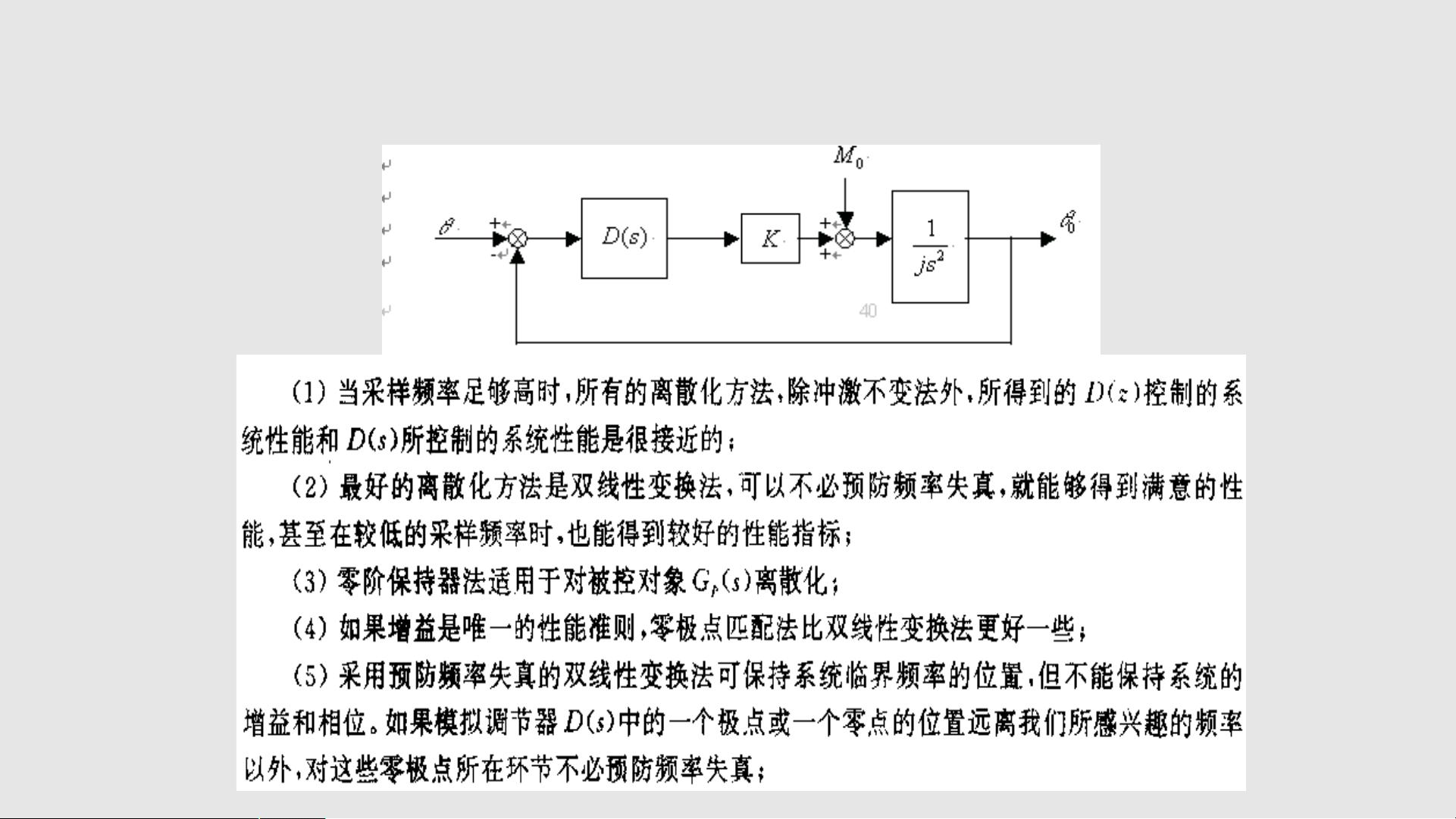
Z变换法是一种常用的离散化方法,它建立了D(z)与D(s)之间的映射关系,旨在保持模拟控制器的脉冲响应与数字控制器输出的一致性,但需要解决高频混迭问题,通常通过提高采样角频率来避免。
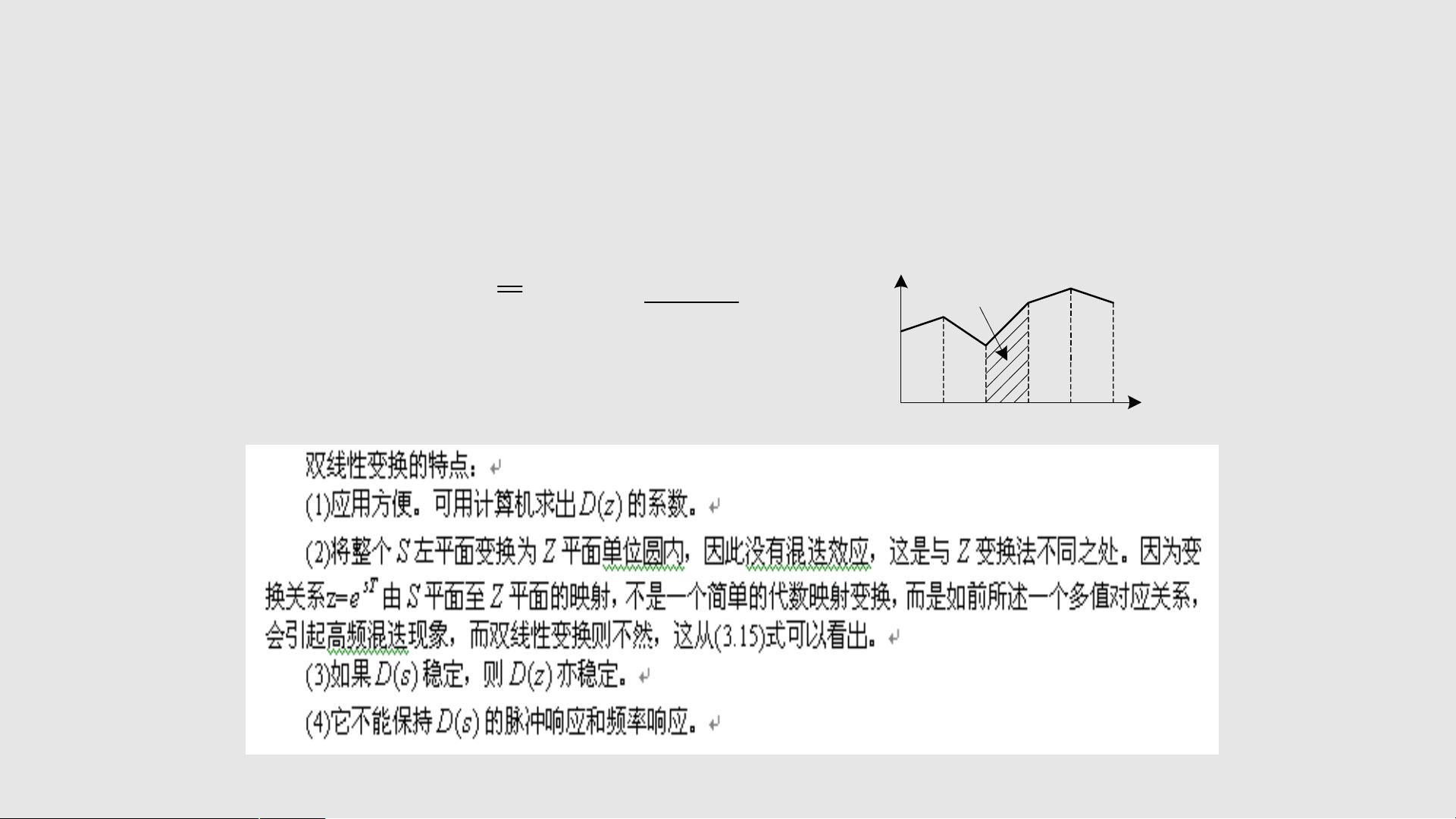
其他离散化技术包括带零阶保持器的Z变换法、差分变换(数值积分法),这些方法将连续系统的微分方程转换为差分方程,最终得到z传递函数。双线性变换则是基于z变换的扩展,它允许实s传递函数与z传递函数之间的转换,提供了一种灵活的设计工具。
重点讨论的数字PID控制部分,介绍了理想微分PID控制,该控制策略根据系统的误差e(t)来确定模拟PID控制规律。在模拟控制器的离散化设计过程中,如何选择合适的离散化方法,并确保在数字化过程中模拟校正装置的关键性能指标得以保留,是设计师必须考虑的关键问题。
总结来说,这份文档深入探讨了数字PID算法的离散化设计过程,涵盖了离散化方法的选择、模拟控制器特性保持、不同变换技术的应用,以及理想微分PID控制的具体实施,对于理解数字控制器设计的实践有着重要的指导意义。
4. 双线性变换
法
根据 z 变换定
义 :
展成级数:
同理:
得双线性变换公式 :
第 11 页 / 共 112 页
2/
2/
Ts
Ts
Ts
e
e
ez
2/1...
!3
)2/(
!2
)2/(
2/1
32
2/
Ts
TsTs
Tse
Ts
2/1
2/
Tse
Ts
21
2/1
Ts
Ts
z
剩余63页未读,继续阅读
2021-10-03 上传
2024-05-29 上传
2021-10-11 上传
2021-10-01 上传
2021-10-01 上传
2021-12-27 上传
2021-10-01 上传
2021-10-07 上传

zhushishushu
- 粉丝: 0
- 资源: 11万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 批量文件重命名神器:HaoZipRename使用技巧
- 简洁注册登录界面设计与代码实现
- 掌握Python字符串处理与正则表达式技巧
- YOLOv5模块改进 - C3与RFAConv融合增强空间特征
- 基于EasyX的C语言打字小游戏开发教程
- 前端项目作业资源包:完整可复现的开发经验分享
- 三菱PLC与组态王实现加热炉温度智能控制
- 使用Go语言通过Consul实现Prometheus监控服务自动注册
- 深入解析Python进程与线程的并发机制
- 小波神经网络均衡算法:MATLAB仿真及信道模型对比
- PHP 8.3 中文版官方手册(CHM格式)
- SSM框架+Layuimini的酒店管理系统开发教程
- 基于SpringBoot和Vue的招聘平台完整设计与实现教程
- 移动商品推荐系统:APP设计与实现
- JAVA代码生成器:一站式后台系统快速搭建解决方案
- JSP驾校预约管理系统设计与SSM框架结合案例解析
