PIC16F873单片机控制步进电机系统设计
186 浏览量
更新于2024-08-29
收藏 321KB PDF 举报
"基于PIC16F873单片机的步进电机控制系统"
这篇文档主要介绍了基于PIC16F873单片机的步进电机控制系统的设计和实现。步进电机因其精确的定位和良好的实时性,在运动控制领域得到广泛应用。然而,不合理的脉冲频率变化会导致电机失步或过冲,影响系统的定位性能,同时快速的加减速也是系统的重要需求。
1. 控制系统总体方案设计
系统采用单片机 PIC16F873 直接生成电机各相的控制脉冲序列。为确保系统安全,光耦用于光电隔离,而功率MOSFET管驱动电路由分立元件构成,用于驱动电机运转。此外,系统还包含了键盘接口和LED显示功能,这些功能由支持SPI串行接口的ZLG7289芯片提供。用户可以通过键盘设置电机的工作模式和转速,使用旋钮进行连续调速,或者通过上位机实现更精细的控制。
2. 硬件电路设计
- 控制电路设计:主控芯片选择的是PIC16F873,这是一款具备强抗干扰能力、低功耗特性的单片机。它包含硬件看门狗、SPI通信端口、A/D转换器、PWM输出、大容量存储器和多个定时器等丰富的内置资源,适合此设计需求。RA0口连接可调电位器,通过A/D转换调整输出脉冲频率,实现电机速度的连续调节。RB6口用于过流检测,通过中断快速响应,确保电机运行的安全。
3. 软件设计
虽然没有提供详细的软件设计内容,但可以推测系统会包含以下部分:
- 脉冲发生器:产生步进电机所需的控制脉冲序列,根据RA0的模拟信号调整脉冲频率。
- 加减速算法:确保在升降速过程中,脉冲频率的平滑变化,防止电机失步或过冲。
- 键盘和显示驱动:处理键盘输入,更新LED显示,可能包括速度设置、状态指示等功能。
- 通信协议:可能采用SPI协议与上位机交互,实现远程控制和参数配置。
通过这样的设计,系统能够实现灵活的控制策略,兼顾精度和效率,满足不同应用场景的需求。同时,硬件电路设计考虑了隔离和保护措施,增强了系统的稳定性和可靠性。
基于基于PIC16F873单片机的步进电机控制系统单片机的步进电机控制系统
引言 单片机控制步进电机具有功能灵活多样,脉冲输出准确,实时性强等特点,通过软件设计可以实现各
种复杂的控制,其系统成本较低,近些年来已被广泛应用在各种不同的运动控制系统中。 在实际应用中,
若步进电机在升降速时,脉冲频率的变化不合理,就会使电机失步或者过冲,使系统无法做到定位;同时,由
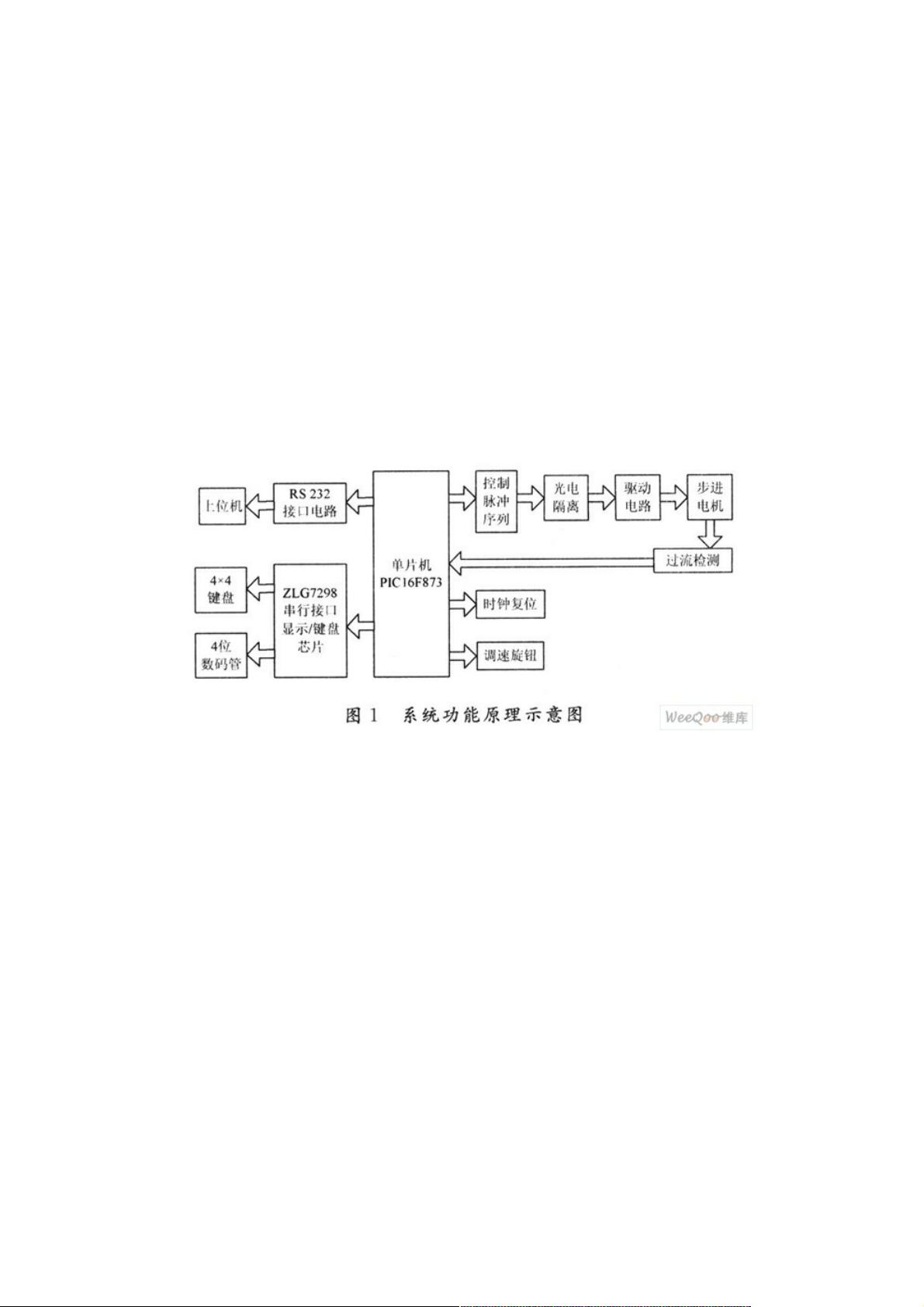
于系统快速性的要求,电机需要很快地完成加减速过程。 1 控制系统总体方案设计 系统功能原理示意
图如图1所示。 在该系统中由单片机直接输出电机的各相控制脉冲序列,光耦进行必要的光电隔离,采用分
立元件构成功率MOSFET管驱动电路,带动电机转动。键盘接口与 LED显示功能由具有SPI串
引言引言
单片机控制步进电机具有功能灵活多样,脉冲输出准确,实时性强等特点,通过软件设计可以实现各种复杂的控制,其系
统成本较低,近些年来已被广泛应用在各种不同的运动控制系统中。
在实际应用中,若步进电机在升降速时,脉冲频率的变化不合理,就会使电机失步或者过冲,使系统无法做到定位;同
时,由于系统快速性的要求,电机需要很快地完成加减速过程。
1 控制系统总体方案设计控制系统总体方案设计
系统功能原理示意图如图1所示。
在该系统中由单片机直接输出电机的各相控制脉冲序列,光耦进行必要的光电隔离,采用分立元件构成功率MOSFET管
驱动电路,带动电机转动。键盘接口与 LED显示功能由具有SPI串行接口功能的ZLG7289实现。既可使用按键输入的方式设
置电机的工作方式与转速,也可以通过调速旋钮实现电机转速的连续调节,还能通过上位微机实现对电机工作方式的调整与控
制。
2 硬件电路设计硬件电路设计
2.1 控制电路设计控制电路设计
控制芯片采用PIC16F873,该单片机具有抗干扰能力强,超低功耗。芯片自带硬件看门狗,具有高速SPI通信端口,6通
道10位A/D转换,2路PWM输出,8 KB容量的FLASH存储器,368 B容量的SRAM,3个定时器,1个SPI串行通信口。由于
单片机内部的资源丰富,性价比高。能够满足该设计的要求,而且减少硬件电路的设计,提高工作效率。单片机的外部引脚定
义以及在该设计的资源分布如图2所示。
下载后可阅读完整内容,剩余4页未读,立即下载
146 浏览量
146 浏览量
209 浏览量
111 浏览量
2022-04-29 上传
101 浏览量
2024-03-15 上传
2022-01-22 上传

weixin_38686924
- 粉丝: 14
- 资源: 956
 我的内容管理
展开
我的内容管理
展开







最新资源
- alfred-abbr:关于缩写的阿尔弗雷德(Alfred)工作流程
- 企业新员工的非制度性培训DOC
- ChristineCao98.github.io
- app-algoexpert:ClémentMihailescu和AlgoExpert的软件工程项目CONTEST的获奖项目-2020年冬季
- 娱乐休闲会所大厅模型
- optical-character-recognition-OCR:使用CNN预测验证码图像中的文本
- introduction-to-node-mongo
- 企业-汇创达-2020年年终总结.rar
- 新员工入职培训教材
- soundphase
- Transfer Function V2.2:这是控制计算器 GUI,适用于希望查看传递函数的各种结果的人。-matlab开发
- Unity 特效资源包 TopDownEffects
- 休闲书房三维模型设计
- The Annoy-O-Bug:鸣叫的灯光鸟-项目开发
- 电信设备-去除三氯氢硅中硼杂质的方法.zip
- arnab-dibosh.github.io:商业组织的网站
