六足机器人设计与步行控制研究:从机械结构到软件开发
需积分: 50 44 浏览量
更新于2024-07-17
4
收藏 1.73MB DOCX 举报
"本文主要探讨了六足机器人的系统设计及其步行控制的研究,涉及机械结构设计、动力学分析、运动学、步态规划和软件控制系统等多个方面。"
六足机器人设计是一个复杂而综合的工程,它涉及到机械工程、电子工程、计算机科学等多个领域。在本文中,作者首先对六足机器人的机械结构进行了详细的设计。这包括腿部机构和机身结构的分析和选型。腿部机构的设计考虑了机器人在不同地形上的行走能力和稳定性,而机身结构则关乎整体的承载能力与运动灵活性。通过三维建模,作者可以更直观地理解各部件的相互关系,同时利用ADMAS软件进行动力学分析,以确保机器人在实际运行中的性能和效率。
接下来,作者讨论了驱动系统和控制系统的设计。驱动系统是机器人运动的基础,它决定着机器人各个关节的动力输出,而控制系统则负责处理传感器数据、执行控制策略,使机器人能够按照预定指令行动。这两部分的设计对于实现机器人的自主行走至关重要。
在完成硬件设计后,文章的重点转向了步行控制。运动学分析是理解机器人运动的基础,作者通过建立D-H模型来描述六足机器人的关节坐标系统,解决了运动学正逆问题,从而可以计算出关节角度变化与末端位置的关系。步态规划是控制机器人行走的关键,作者探讨了相序变换、占地系数和稳定性等关键因素,这些因素决定了机器人的步态效率和行走稳定性。通过精心设计的步态规划,六足机器人能够在保持平衡的同时完成各种复杂的行走任务。
最后,作者进行了六足机器人的上层控制系统软件开发。利用基于模型设计的方法,如Simulink,构建了控制系统模型,并通过CCS与MATLAB的联合配置,实现了控制代码的自动生成。代码测试确保了软件的正确性和可靠性,从而完成了整个设计过程。
这篇毕业设计展示了六足机器人从机械设计、动力学分析、运动控制到软件开发的全过程,充分体现了机械电子工程的专业知识和技能应用。通过对六足机器人的深入研究,不仅为未来多足机器人技术的发展提供了参考,也展示了作者在这一领域的扎实理论基础和实践能力。
第四章 六足机器人控制系统软件设计
一.2.1 国外多足步行机器人研究成果
目前,国外在多足步行机器人方面取得重要进展主要体现在军事应用与空间探
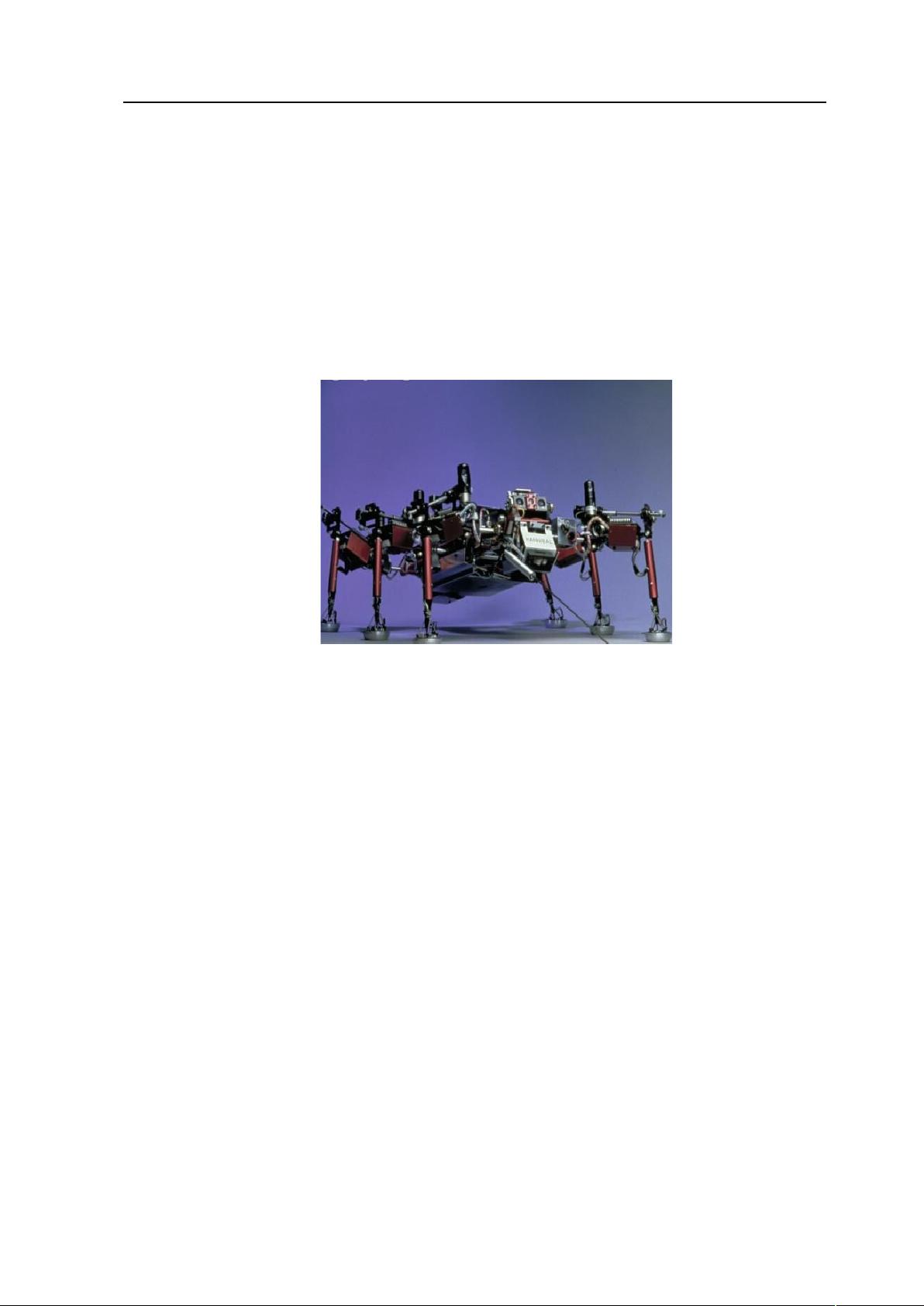
测方面。 Attila (如图 1.1 )是九十年代由 Mobot 实验室研制的第一款用于星球
探测的自主 移动六足机器 人,其结构上 采取模块 化设计, 每条 腿 都是一 个独立
单元。腿部仿照昆虫身体架构采用多关节开链形式,每条腿 3 个自由度,六条腿
总计 18 个自由度,保证了机器人的灵活性。其模块化的设计思路,使得机器人
即时有腿出现故障,仍能保持正常移动。Attila 机身长 35cm,质量为 2.8kg,装
有 60 多个传感器,为其采集外部环境参量。
图 1.1 机器人 Attila
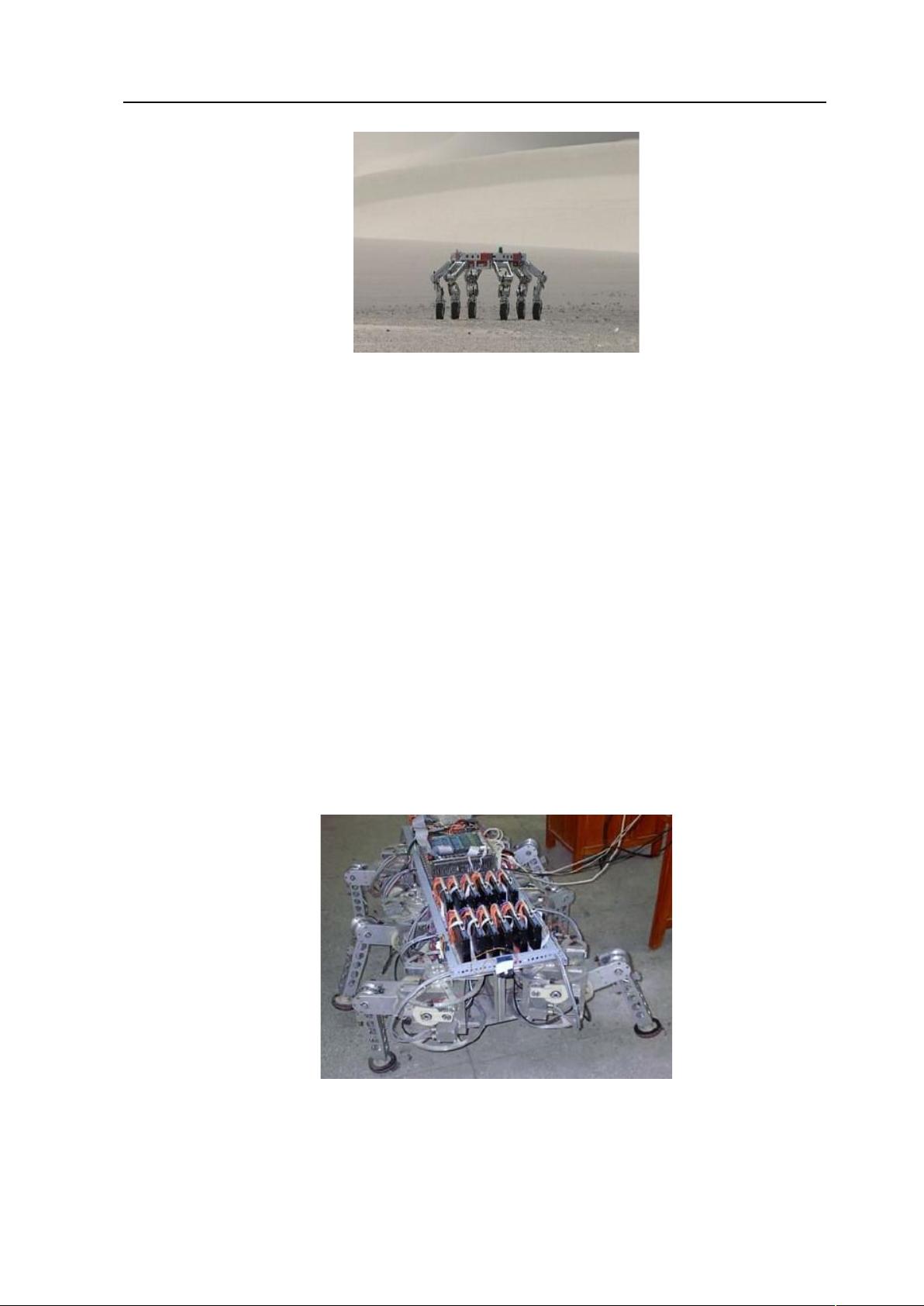
1996 年 ,美国 Irobot 公司在 Darpa 与海 军研究所的资 助下设计出了 一款用于
侦察,排雷的机器人 Ariel(如图 1.2)。其体长 56cm,质量约为 10.4kg。该机
器人的腿部结构具有两个自由度,其中跟关节转角 ±90°,髋关节转角±135°。该
机器人仿照 螃蟹进行设计 ,使得机器人 更 容易越 障和保持站立姿态。六 条腿对
称布置,使 得控制 简单, 反应灵敏 ,机动性强, 但转弯能力差 。因为 其工作 的
特殊性,控制器及主线路被封装抗冲击的封闭匣子中。 Ariel 安装有多种传感器,
以使机器人 完成 自主 移动 ,侦察, 扫雷等 工作任 务。其系统还配有自适 应程 序,
以使得在工 作过 程中,外 界环境发 生突然 变化时 ,机器人能够 做出迅速 有效的
反应。
6

剩余45页未读,继续阅读
209 浏览量
726 浏览量
122 浏览量
2021-08-14 上传
2021-08-14 上传
461 浏览量
253 浏览量

weixin_44385865
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- easypanel虚拟主机控制面板 v1.3.2
- Coursera
- wind-js-server:用于将Grib2风向预报数据公开为JSON的服务
- 生命源头论坛 LifeYT-BBS V2.1
- TUTK_IOTC_Platform_14W42P2.zip TUTK IOTC官方sdk
- WeatherJournalApp
- 电商小程序源码项目实战
- 美女婚纱照片模板下载
- GB 50231-1998 机械设备安装工程施工及验收通用规范.rar
- MPT-开源
- facebook-archive:使用Facebook的存档数据可以享受一些乐趣
- 阿普奇工业显示器PANEL2000.zip
- action_react
- Torus-开源
- 应用js
- WPF将控件中的文字旋转.zip
