无人机航拍图像超分辨率重建:基于改进稀疏表示的正则化方法
版权申诉
162 浏览量
更新于2024-06-28
收藏 300KB DOCX 举报
"基于改进稀疏表示正则化的SR重建算法"
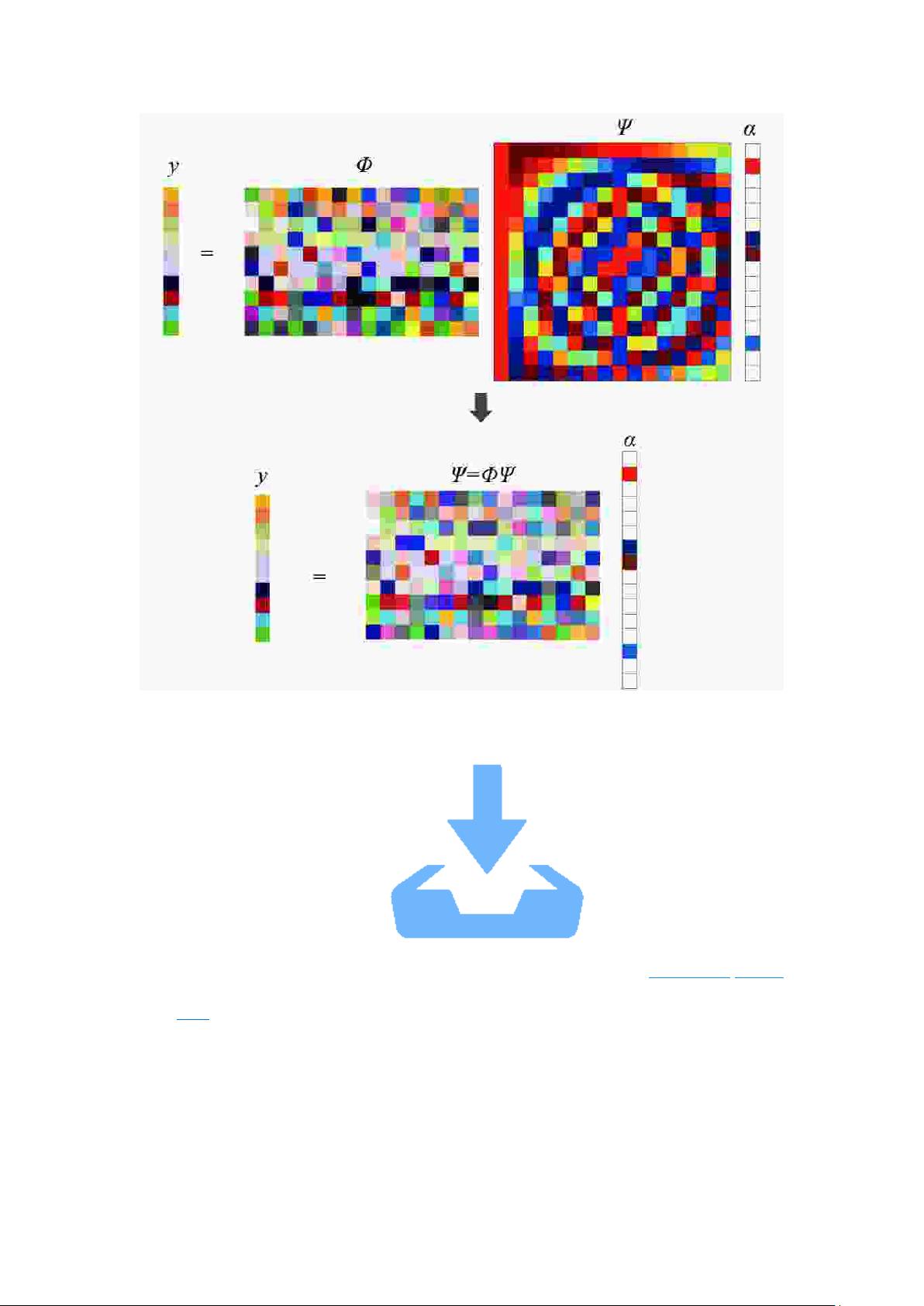
本文探讨的是超分辨率重建(Super-Resolution,简称SR)技术,这是一种旨在提升低分辨率(Low-Resolution,LR)图像到高分辨率(High-Resolution,HR)的技术。在无人机自主导航中,航拍图像的质量对后续识别的准确性至关重要。然而,实际操作中,由于各种因素如天气、拍摄角度和成像质量,航拍图像往往质量不佳,导致细节丢失,影响导航精度。为了改善这种情况,可以在不改动硬件的情况下,利用信息融合的超分辨率重建技术。
超分辨率重建本质上是一个逆问题,它试图从退化的LR图像中恢复原始的HR图像。由于这是一个病态问题,直接求解可能会导致噪声放大和细节丢失。因此,引入正则化方法变得尤为重要。正则化通过添加额外的信息约束,使原本病态的问题转变为稳定的过程,有助于抑制噪声并保持图像边缘的清晰度,从而提高重建图像的空间分辨率。
当前的SR重建算法主要分为基于频域和基于空域两类。频域方法通常忽视了图像退化和先验信息,导致重建效果不尽如人意。相比之下,空域方法更注重图像的退化模型,并利用图像的先验信息,能更好地从LR图像重建HR图像。
文献中提到的几种空域正则化方法包括:
1. 拉普拉斯正则化:Lee等人提出的这种方法通过引入平滑性约束,简化了目标函数的求解,有助于图像重建。
2. 吉洪诺夫正则化:韩玉兵等采用l2范数的吉洪诺夫正则化,虽然增强了图像的平滑度,但也可能导致边缘模糊和高频细节的丢失。
3. 总变分正则化(TV):Marquina等人提出的TV算法通过分段约束来平滑图像同时保留边缘,有效平衡了平滑度和细节保真度。
4. 双边总变分正则化(BTV):Omer等在此基础上进一步发展了BTV算法,它结合空间和灰度信息,更精确地保持图像边缘和局部细节。
这些正则化方法在不同方面各有优势,但都致力于在保持图像细节的同时,优化图像质量和分辨率。随着研究的深入,改进的稀疏表示正则化算法被提出,其目的是通过更精确地表示图像的稀疏特性,进一步提升SR重建的效果。这种改进的算法有望在保留图像细节的同时,增强图像的清晰度和真实感,对于无人机导航中的图像处理具有重要意义。
剩余17页未读,继续阅读
2021-02-08 上传
2021-02-23 上传
2019-05-24 上传
2023-09-01 上传
2024-04-29 上传
2021-12-24 上传
2021-12-25 上传
2023-09-22 上传

罗伯特之技术屋
- 粉丝: 4436
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
