串口驱动深度解析:发送与接收机制及关键寄存器功能详解
需积分: 9 166 浏览量
更新于2024-07-23
收藏 213KB DOC 举报
串口驱动程序是计算机硬件与软件之间的重要桥梁,特别是在嵌入式系统中,如Mini2440开发板上的串口通信。本文将深入分析串口驱动程序的工作原理和关键组件,以便帮助学习者理解驱动程序的设计和实现。
首先,发送和接收过程是串口通信的核心功能。发送部分通过循环缓冲区(发送FIFO,也称为发送移位寄存器)进行操作,用户将数据写入FIFO,然后在每个时钟周期内,FIFO自动将数据传递给发送移位寄存器,逐位通过串口线发送出去。这个过程无需驱动程序实时干预,实现了数据的高效传输。
接收过程则是通过接收移位寄存器接收来自串口的数据,当接收的数据量超过预设的触发门限值时,会触发中断,驱动程序中的中断处理函数会被调用,将接收到的数据暂存到Flip_buf中。这种设计确保了接收数据的完整性,并提供了灵活的中断机制来响应接收状态变化。
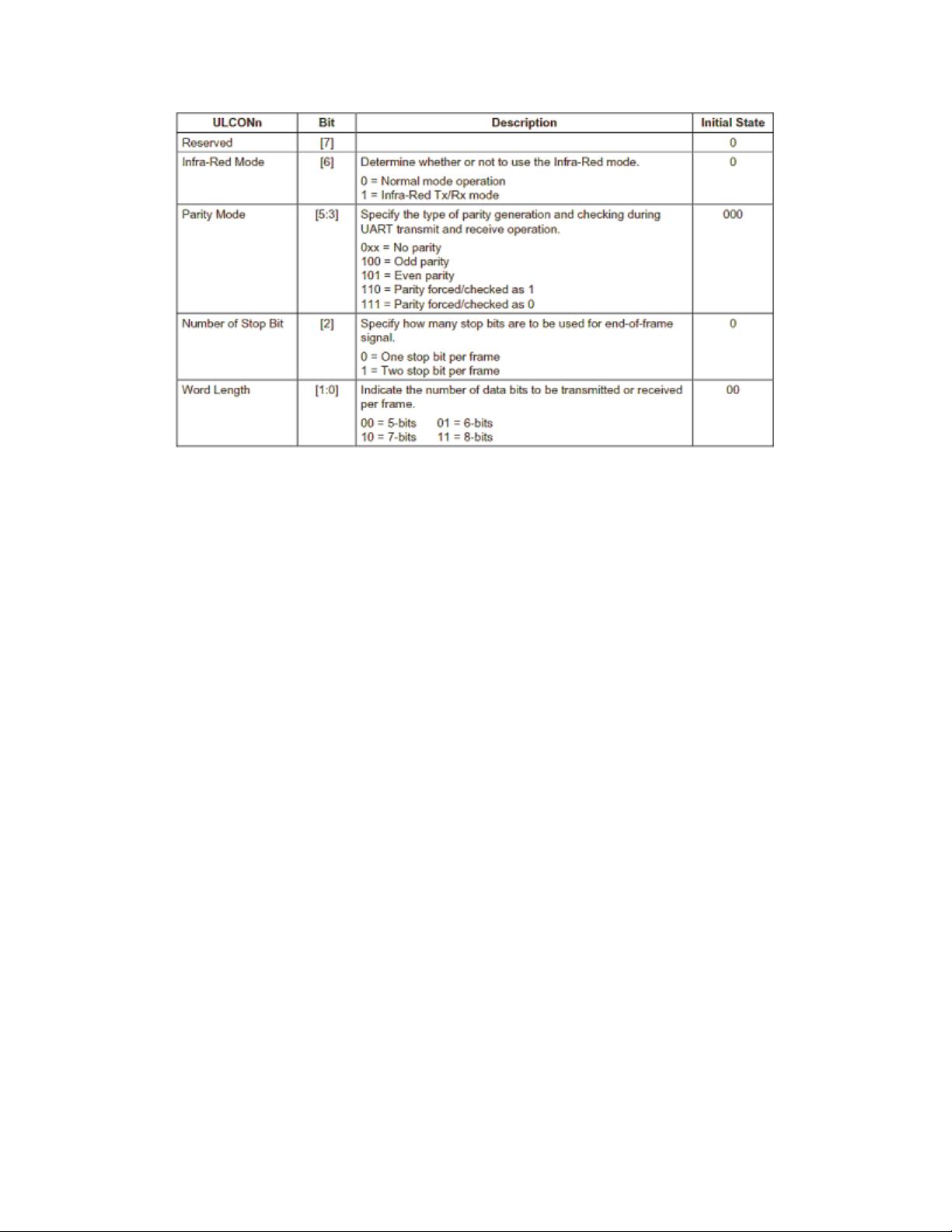
接下来,文章详细讨论了两个重要的寄存器:UARTLineControlRegister和UARTFIFOControlRegister。UARTLineControlRegister用于配置串口的通信参数,比如数据位长度、停止位数、奇偶校验类型和红外模式等。在UART模式下,需要确保IRMode为0,以避免干扰。
UARTControlRegister和ReceiveMode/TxMode寄存器负责选择接收和发送模式,包括DMA(直接内存访问)的选择,以及是否允许在传输过程中发送Break信号。接收错误和超时中断的控制也非常关键,通过RxErrorStatusInterruptEnable和RxTimeoutEnable可以灵活管理这些中断。
RxInterruptType和TxInterruptType寄存器则用于选择中断类型,有脉冲式中断(Level)和电平模式中断,分别对应于FIFO模式和非FIFO模式下的中断触发条件。FIFOEnable寄存器允许启用或禁用FIFO功能,而RxFIFOReset和TxFIFOReset则用来决定复位FIFO时是否清除其内部数据。
总结来说,串口驱动程序的复杂性在于它不仅要处理底层硬件的通信细节,还要根据应用需求灵活配置通信参数,并管理中断以确保数据的准确传输。了解这些关键点对于开发基于Mini2440的串口驱动程序至关重要,无论是编写驱动代码还是优化通信性能,都需要深入理解和掌握这些概念。
FIFO Enable :FIFO 使能选择。
Rx FIFO Reset :选择当复位接收 FIFO 时是否自动清除 FIFO 中的内
容。
Tx FIFO Reset :选择当复位发送 FIFO 时是否自动清除 FIFO 中的内
容。
Rx FIFO Trigger Level :选择接收 FIFO 的触发水平。
Tx FIFO Trigger Level :选择发送 FIFO 的触发水平。
剩余21页未读,继续阅读
2006-05-29 上传
145 浏览量
2023-06-10 上传
2024-04-09 上传
2023-11-21 上传
2024-09-05 上传
2023-08-18 上传
2023-09-14 上传
2023-06-13 上传

hum_ber
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
