FANUC机器人V1.1.1编程标准:零位校核与外部轴设置教程
版权申诉
160 浏览量
更新于2024-06-23
收藏 1.26MB DOCX 举报
FANUC机器人编程标准V1.1.1提供了详细的操作指南,适用于FANUC机器人的零位校核和外部轴设定。主要内容包括以下几个部分:
1. **机器人零位校核程序**:
- 编写名为ROBOT1.ZERO(根据机器人数量依次递增)的程序,用于检查和记录机器人六个轴(positionreg61-63)的初始零位,即机械标记位置。新出厂的机器人如果零位未丢失,可直接使用这个程序进行验证。
2. **POSITIONREG位置寄存器**:
- 这些寄存器用于存储机器人关节的位置信息,通过设置positiondetail为0,确保机器人处于正确的位置状态。
3. **零位码盘值存储**:
- 系统变量$dmr_grp(1)-$master_coun显示机器人六个轴的码盘值,初次开机后应拍照保存,便于后续参考和调整。
4. **清零操作**:
- 使用menu-system-variables-$PARAM_GROUP-DETAIL-MASTER_POS将所有数据设为0,可能涉及重置某些参数。
5. **外部轴零位校核**:
- 外部轴零位设定涉及实际机械操作,包括转动至机械零位标记、启用外部轴($master_enable=1)、调用cal功能进行设置,并确认与零位相关的GROUP号。
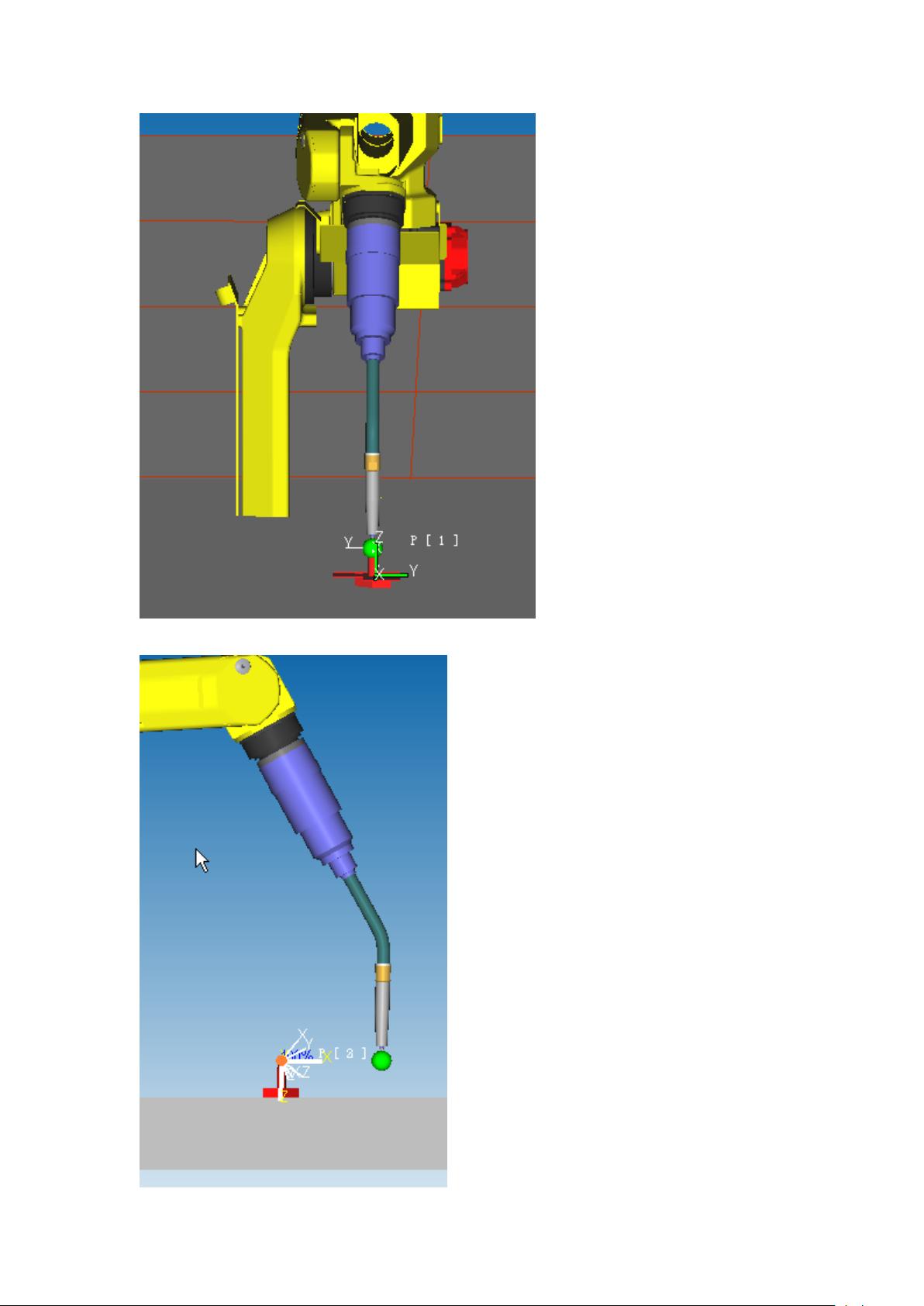
6. **外部轴零位程序示例(以转台为例)**:
- 对于弧焊焊枪,推荐采用6点XZ法进行工具中心点TCP(TCP)的标定,涉及到机器人姿态变化、工具坐标系的建立,确保X正向沿焊枪平面向前,Z正向沿鹅颈方向向下。
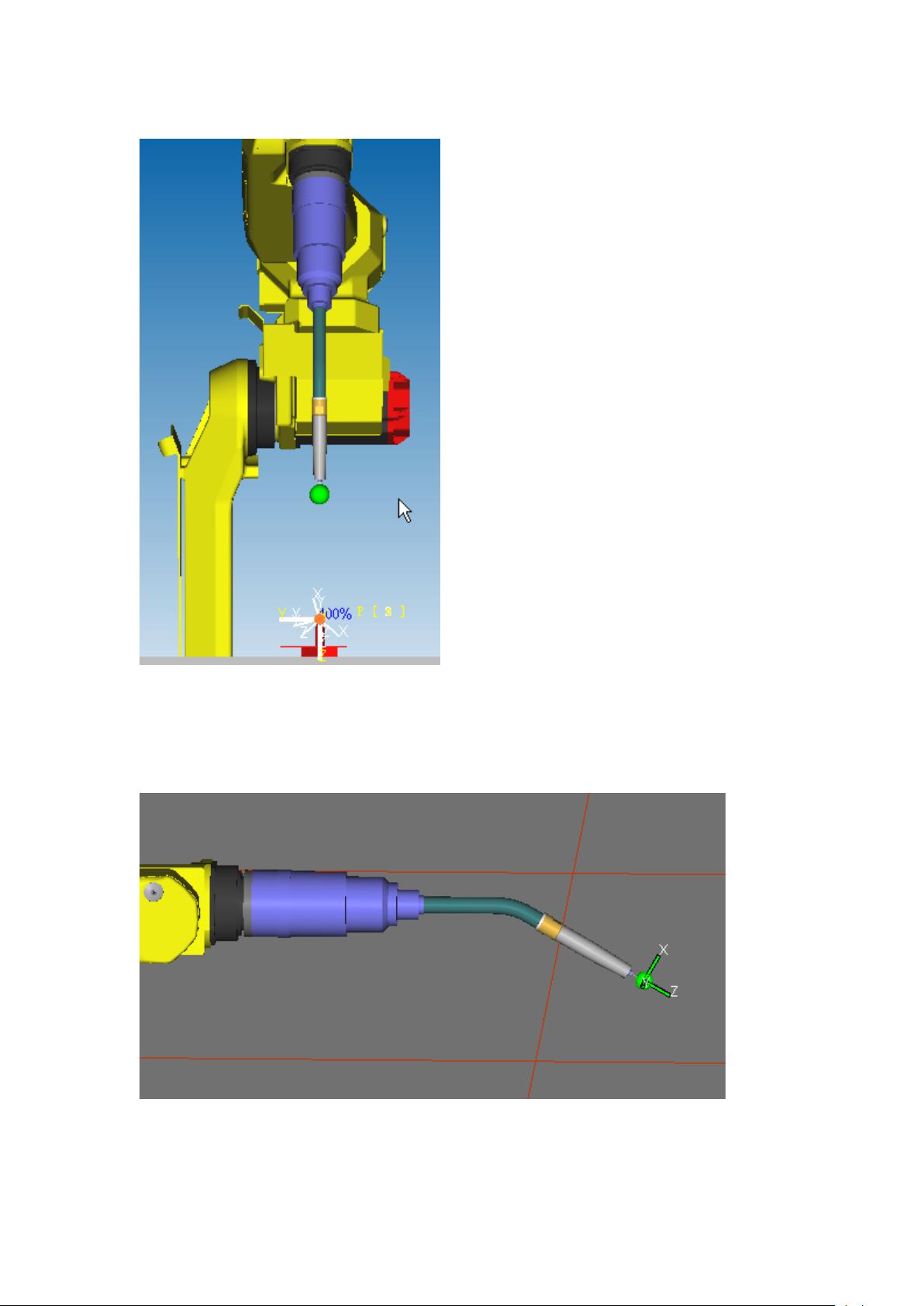
7. **TCP设定注意事项**:
- 标定时,1-3点要求姿态变化大,4点作为原点,5、6点分别用于确定X+和Z+方向,这有助于调试和保证焊接轨迹的准确性。
FANUC机器人编程标准V1.1.1强调了零位校准和外部轴操作的重要性,提供了一套完整的流程和步骤,确保了机器人的精确控制和工作性能。在实际操作时,严格按照这些步骤进行,可以有效提高工作效率并避免潜在的问题。
第 5 点,向机器人正前方运动 200mm,确定工具坐标系 X+方向
剩余44页未读,继续阅读
2022-07-10 上传
2022-06-30 上传
2022-07-10 上传
2013-03-14 上传
2011-06-29 上传
2012-03-23 上传
2017-11-07 上传
2019-05-10 上传
2022-10-28 上传

omyligaga
- 粉丝: 88
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- IOS应用源码Demo-设计精美的机遇tableView的个人简介模板-毕设学习.zip
- test262-parser:解析test262格式的测试并提供API
- 基于STM32的机器人设计资料 包含程序原理图文件
- 基于微信小程序的数字名片实现源码.zip
- Advanced_Descriptors-2.1.0-cp35-cp35m-manylinux1_i686.whl.zip
- iSlider手机端图片滑动切换
- 手机wap源码模板 (43).zip
- Ethernet bridge tables-开源
- IOS应用源码Demo-两个OPENAL例子,网上找的,共享一供学习OpenAlTest-毕设学习.zip
- slim-bookshelf:探索性Slim Framework 3应用程序
- 含仿真录像,基于DWT-DCT-SVD的多通道彩色图像水印系统MATLAB仿真,并测试各类attack对水印鲁棒性影响
- DDK拧紧枪参数设置软件(英文版).zip
- Cake.StyleCop:CakeBuild构建系统的Stylecop实现
- 基于jsp的鱼类饵料管理系统源码.zip
- add-variety-cpp-6872Vishal:add-variety-cpp-6872Vishal由GitHub Classroom创建
- libBand-开源
