发那科机器人文件备份与导入操作详解
需积分: 0 17 浏览量
更新于2024-08-04
收藏 1.11MB PDF 举报
发那科机器人文件备份及导入是机器人操作中的关键环节,确保数据安全和系统恢复能力。本文档详细介绍了在发那科机器人系统中进行文件备份和导入的步骤。
首先,我们来看文件备份部分:
1.1 存储卡安装
在正常启动机器人的前提下,进入一般模式。备份设备的安装方式包括将U盘插入示教盒的USB接口或控制柜的USB端口,如果是CF卡,则插入主板上的PCMCIA端口(适用于大型控制柜,如R-30iAMATE柜),或者控制柜门上的接口。
1.2 备份步骤
- 进入文件系统:通过菜单选择7:FILE进入界面。
- 设定装置:根据设备类型选择不同的设置,如U盘插在示教盒选择USBonTP(UT1:),控制柜体上的U盘选择USBDISK(UD1:), CF卡选MemCard(MC:)。
- 创建文件夹:设定装置后,新建一个文件夹如FILE_BACKUP,然后按ENTER确认。
- 备份文件:选择备份所有文件(8:ALLofabove),确认是否删除旧备份,然后开始备份,等待过程完成。
接下来是文件导入部分:
2.1 文件夹进入
在控制启动模式下,通过MENU→FILE进入文件系统,设定设备与备份时保持一致,这里以CF卡为例。找到要导入的文件夹FILE_BACKUP并进入。
2.2 TP程序导入
- 选择RESTOR选项,然后选择TP programs。
- 系统询问是否覆盖现有TP程序,确认YES后,开始导入TP程序文件,直到导入完毕。
2.3 全备份导入
- 通过RESTOR→6:Allofabove选择导入全部备份。
- 系统询问是否覆盖现有数据,同样确认YES后,开始导入全备份的所有内容,直至导入完成。
总结来说,发那科机器人的文件备份与导入涉及对存储设备的识别、文件系统的操作、文件夹的创建和管理,以及关键数据(如TP程序和全备份)的复制与替换。这些步骤对于维护系统的稳定性、防止数据丢失以及进行故障恢复至关重要。操作时务必遵循文档中的指导,以确保操作的准确性和安全性。
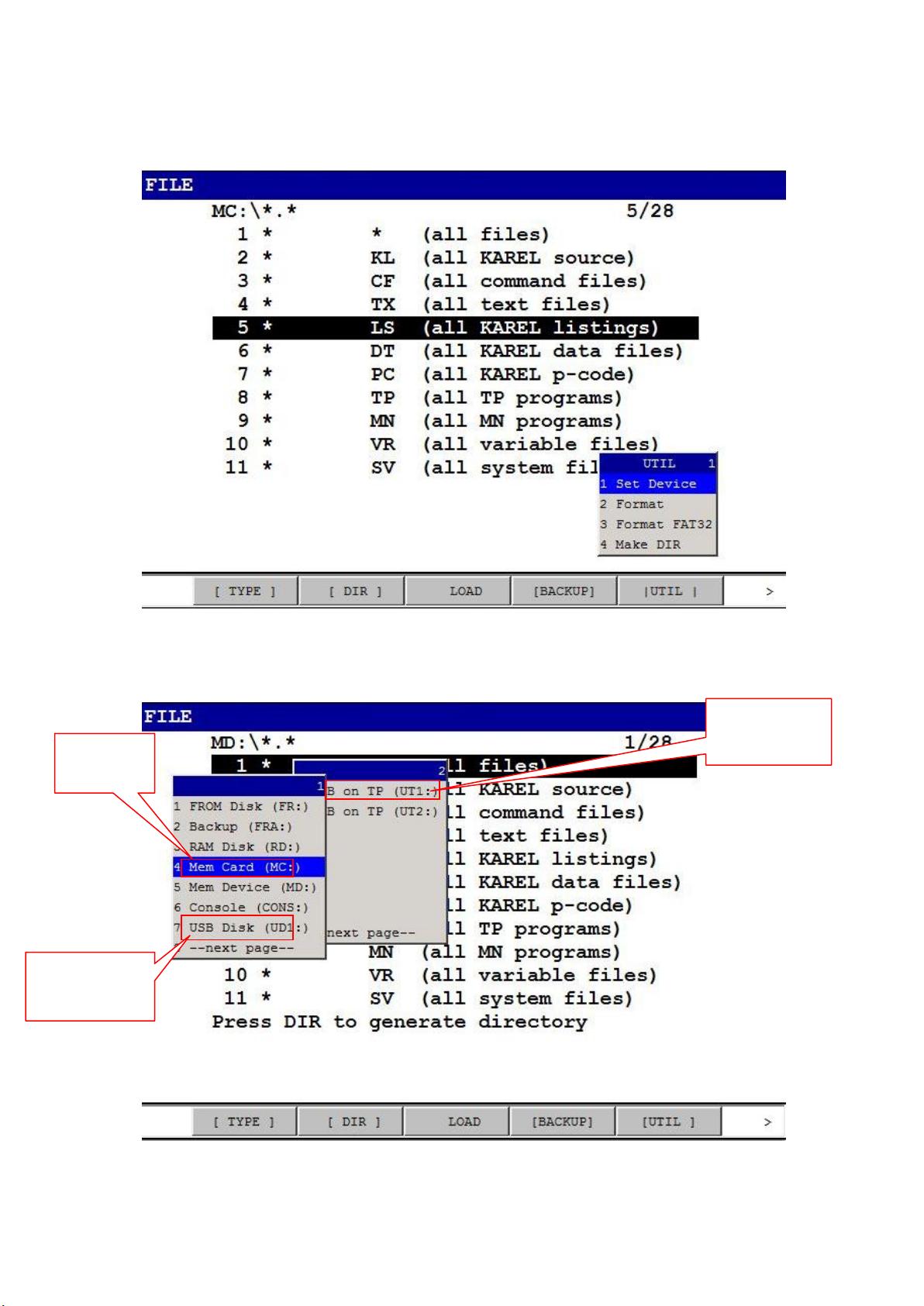
步骤 2:设定装置
在文件系统界面,按下 F5:UTIL→1:Set Device
※如果存储设备时 U 盘,且是插在示教盒的 USB 接口上,选择 USB on TP (UT1:);
※如果存储设备是 U 盘,且是插在控制柜体上的,选择 USB DISK(UD1:);
※如果存储设备时 CF 卡,则选择 Mem Card(MC:)。
U 盘插在示教
盒上来备份
使用 CF 卡
备份
U 盘插在控制
柜体上来备份
剩余10页未读,继续阅读
2022-06-09 上传
2019-10-10 上传
2023-09-22 上传
2022-05-27 上传
2021-06-18 上传
2023-09-07 上传

deepbluesgr
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源通讯录备份系统项目,易于复刻与扩展
- 探索NX二次开发:UF_DRF_ask_id_symbol_geometry函数详解
- Vuex使用教程:详细资料包解析与实践
- 汉印A300蓝牙打印机安卓App开发教程与资源
- kkFileView 4.4.0-beta版:Windows下的解压缩文件预览器
- ChatGPT对战Bard:一场AI的深度测评与比较
- 稳定版MySQL连接Java的驱动包MySQL Connector/J 5.1.38发布
- Zabbix监控系统离线安装包下载指南
- JavaScript Promise代码解析与应用
- 基于JAVA和SQL的离散数学题库管理系统开发与应用
- 竞赛项目申报系统:SpringBoot与Vue.js结合毕业设计
- JAVA+SQL打造离散数学题库管理系统:源代码与文档全览
- C#代码实现装箱与转换的详细解析
- 利用ChatGPT深入了解行业的快速方法论
- C语言链表操作实战解析与代码示例
- 大学生选修选课系统设计与实现:源码及数据库架构
