CAN总线远程数据采集系统——下位机设计与实现
74 浏览量
更新于2024-06-23
收藏 2.66MB DOC 举报
"基于CAN总线的远程数据采集系统下位机设计"
这篇本科论文主要探讨了基于CAN(Controller Area Network)总线的远程数据采集系统的下位机部分设计。CAN总线是一种广泛应用的现场总线技术,由于其稳定性和可靠性,尤其在工业控制和汽车电子领域,具有很高的评价。它具有抗干扰能力强、通信速率高、网络维护成本低等特点,使得CAN总线成为分布式控制系统中的首选通信协议。
论文内容主要分为以下几个部分:
1. 系统总体设计方案:概述了整个基于CAN总线的远程数据采集系统架构,包括上位机、CAN总线以及下位机(传感器节点)。上位机通常负责数据处理和显示,提供用户界面;CAN总线作为通信媒介,连接各个下位机节点,形成一个总线型拓扑结构;下位机则包含各种传感器,负责数据的采集。
2. 传感器节点设计:论文详细阐述了两个传感器节点的设计,一个是温度传感器节点,采用了K型热电偶和AD590温度传感器,另一个是压力传感器节点,采用了MPX53DP压力传感器。这些传感器用于获取环境的温度和压力信息,并将数据转换为可被单片机处理的电信号。
3. 放大电路设计:分析并设计了用于放大传感器输出信号的电路,以确保微弱的信号能够被准确地读取和处理。
4. 单片机及附属电路:主要使用了AT89C52单片机,这是一种常见的8位微控制器,用于处理传感器的数据并控制整个下位机的工作。同时,论文还对单片机的键盘接口做了重点分析,因为键盘允许用户在线更改测量范围和报警值等参数。
5. 软件算法:讨论了用于数据处理和通信的软件算法,这部分通常涉及到C51编程语言,C51是专门针对8051系列单片机的编译器,用于编写单片机的应用程序。
6. 系统调试:最后,论文描述了系统调试的过程,这是验证系统功能是否正常的关键步骤,包括硬件和软件的联合调试,确保数据采集的准确性和系统的稳定性。
关键词涉及的领域包括CAN总线技术、数据采集、下位机设计以及AT89C52单片机的使用,这些都是构建这种远程数据采集系统的核心技术。通过对这些关键技术的深入理解和应用,可以实现高效、可靠的远程数据监控和控制。
内蒙古科技大学毕业设计说明书(毕业论文)
10
热电势
/mv
0
5
15
10
温度/℃
100
200
300
400 500
20
16.395
488
图 2.3 K 型热电偶温度-输出热电势关系图
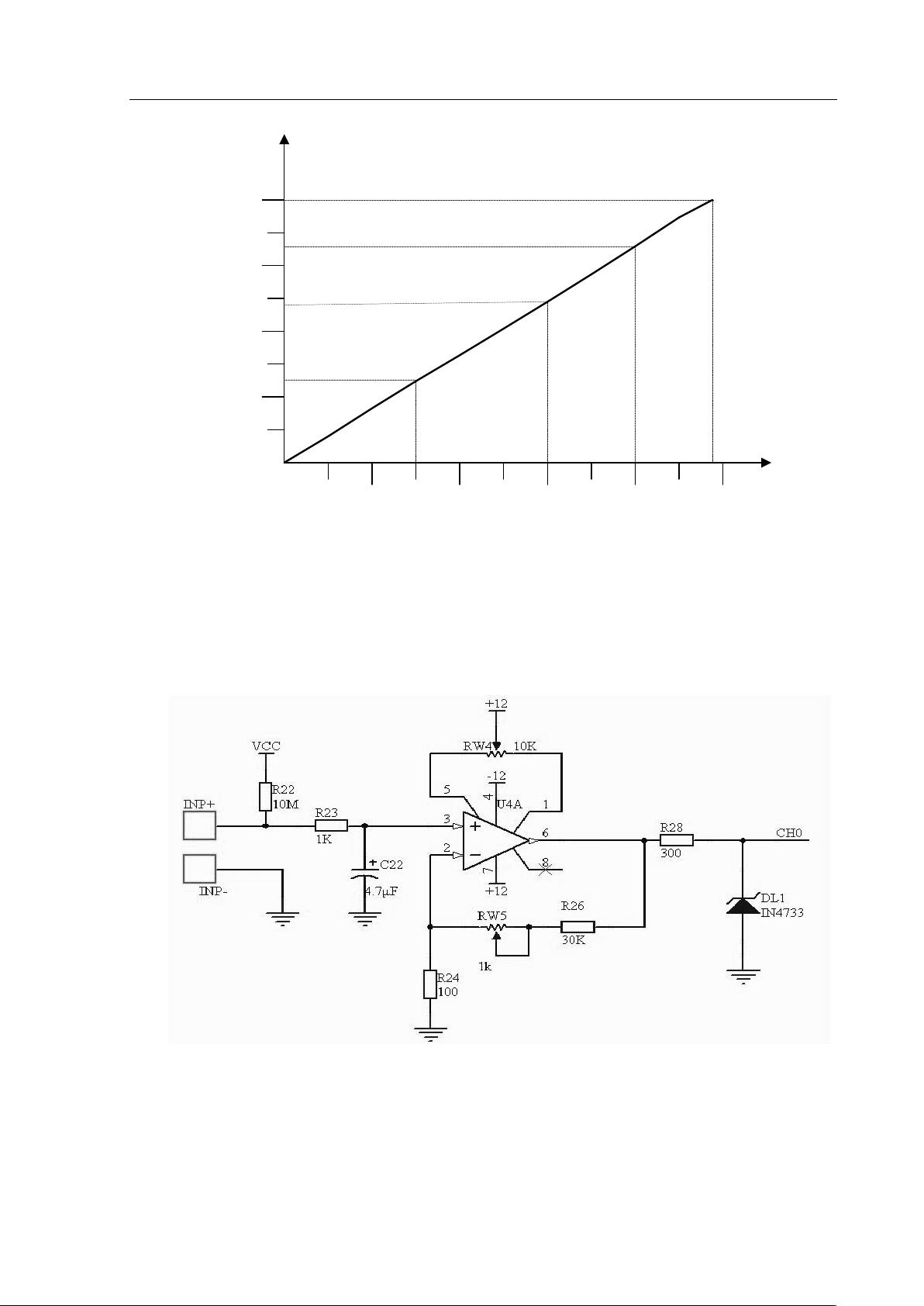
放大电路如图 2.4 所示:
图 2.4 K 热电偶放大电路
如图所示,INP+接热电偶的正极,INP-接热电偶的负极,R
22
起上拉电阻的作用,


剩余98页未读,继续阅读
2021-09-16 上传
点击了解资源详情
2023-07-03 上传
2021-10-11 上传
2021-09-16 上传
2023-07-03 上传

智慧安全方案
- 粉丝: 3846
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- windows+onlyoffice部署.zip
- claudiusvhds:Claudiu的VHD具有所有旧Windows操作系统(1.x-2000)
- DialGuageReader
- relaxation-labeling:一种基于最初的模糊身份标记对象的算法,基于“放松标记过程的基础”(Hummel 1983)
- matlab的slam代码-Navigation-module:具有高级规划器、低级控制器和EKFSLAM的导航模块
- revolver:少量分割
- ARM体系结构及编程 实验三 定时器中断实验
- 某汽车制造厂企业文化手册
- VacayCamp
- 电信设备-基于复眼透镜的摄像头、成像方法及移动终端.zip
- geoserver-2.16-RC-bin.zip
- aspnetcore电子商务
- Pollution-check-arduino:使用arduino测量污染并将数据存储在sd卡中或通过蓝牙传输数据
- mServices:龙卷风
- java飞机游戏.zip
- VB画图程序源码【课程设计】
