"基于深度学习的云端车辆网络物理入侵检测系统"
需积分: 0 200 浏览量
更新于2024-01-05
收藏 11.86MB PDF 举报
"基于深度学习的基于云的车辆网络物理入侵检测"是一项研究领域,旨在利用深度学习和云计算技术来识别和防止车辆网络系统中的物理入侵行为。本文使用了一种名为Cloud-Based Cyber-Physical Intrusion Detection的方法,该方法利用云计算来分析收集到的数据,并运用深度学习算法来检测潜在的入侵行为。
该研究是由来自格林威治大学的George Loukas、Tuan Vuong、Ryan Heartfield、Georgia Sakellari、Yongpil Yoon和Diane Gan等人共同完成的。他们旨在解决车辆网络系统中可能面临的安全风险和威胁问题,例如黑客攻击和恶意软件的入侵。
通过采用深度学习算法,这项研究提供了一种有效的方法来监测和检测车辆网络系统中的潜在入侵行为。深度学习是一种机器学习技术,它通过模拟人脑神经网络的运行方式来进行数据分析和模式识别。借助这种技术,研究人员能够对大量的数据进行自动学习,并能够识别出异常行为和潜在的入侵活动。
另外,云计算技术在这项研究中也扮演了重要的角色。利用云计算平台,研究人员能够更加高效地处理和分析大量的数据,并能够实时监测和防御潜在的入侵行为。云计算技术还能够帮助车辆网络系统灵活扩展,适应不断增长的数据量和计算需求。
研究结果表明,该方法在车辆网络系统中的物理入侵检测方面取得了良好的效果。通过分析大量的车辆网络数据,深度学习算法能够准确地识别出异常行为和入侵活动,并能够及时采取措施来阻止和防御这些威胁。
这项研究对于车辆网络系统的安全具有重要的意义。通过使用深度学习和云计算技术,车辆网络系统能够更好地抵御黑客攻击和恶意软件的入侵,并能够保护车辆和驾乘者的安全和隐私。
总之,基于深度学习的基于云的车辆网络物理入侵检测是一项具有重要意义的研究领域。通过利用深度学习和云计算技术,研究人员能够有效地监测和防御车辆网络系统中的物理入侵行为。这项研究对于车辆网络系统的安全和可靠性具有重要的意义,能够提高车辆和驾乘者的安全和隐私保护水平。
G. Loukas et al.: Cloud-Based Cyber-Physical Intrusion Detection for Vehicles Using Deep Learning
ad hoc networks for the communication between driverless
automobiles, raising the question of what happens when one
of the vehicles misbehaves and launches a cyber attack on
other vehicles on the same network. In this initial work, they
have used NS-2 and mobility simulation tools to evaluate
the performance of an intrusion detection system based on
artificial neural networks. Its input features were some of the
ones typically used in standard network intrusion detection
systems, such as payload sizes, hop counts etc. The same
authors have extended their work to take into account magne-
tometer sensors [32] and gyroscopes [33], and address grey
hole attacks [34].
A common characteristic of all detection mechanisms pro-
vided above, whether local or distributed across multiple
vehicles, is a focus on minimising the processing load, either
by applying lightweight techniques from statistics or by pre-
defining simple behavioural rules that are easy to monitor.
This is because they are all limited by the onboard capabil-
ities of the vehicle at hand. As a result, they usually can-
not leverage modern classification techniques, such as those
currently developed in the field of deep learning. In effect,
the stronger the detection algorithm, the greater the energy
consumption, and in turn the less attractive a solution is for
a resource-constrained vehicle. To overcome this limitation,
we turn to the emerging field of cloud robotics [35]. Our
proposal is to offload the bulk of the processing required to
benefit from deep learning to a more powerful infrastructure
(whether a single server, cloudlet or cloud). By computa-
tion offloading, we refer to the process of executing certain
computational tasks on more resourceful computers which
are not in the user’s immediate computing environment. The
concept has similarities with the online forensics techniques
used for cloud-based detection of malware and tainted data
on Android smartphones [36], [37]. However, instead of
crowd-sourcing detection, we focus on utilising computa-
tional offloading to allow access to deep learning based tech-
niques without the processing and energy cost which would
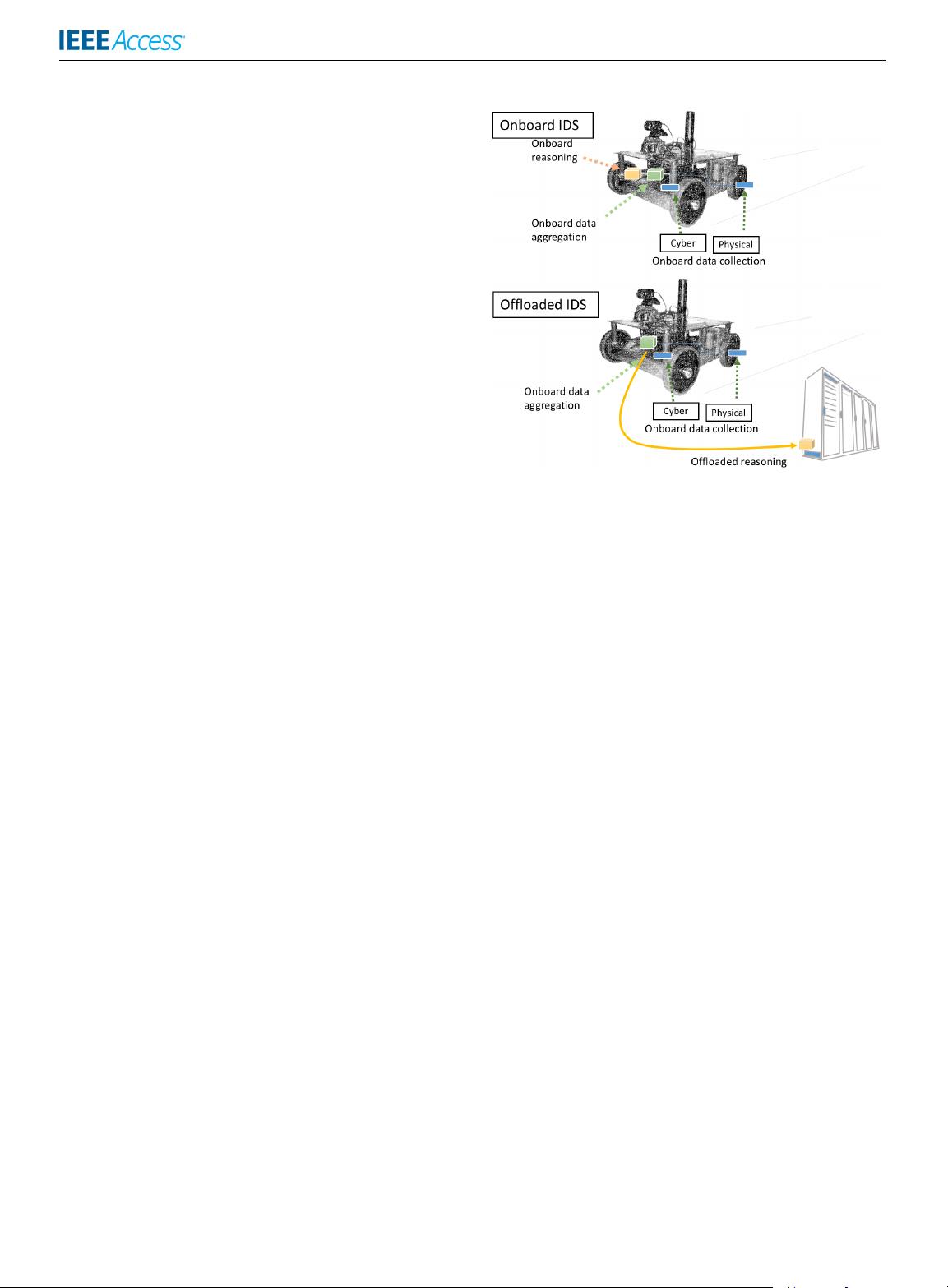
otherwise be prohibitive for a vehicle. Figure 1 illustrates
the conceptual difference between onboard and offloaded
intrusion detection for a vehicle. In both cases, data collec-
tion and aggregation occurs on the vehicle. In the onboard
case, the reasoning (the analysis of the data to determine
whether there is an attack or not) is also on the vehicle. In the
offloaded case, the data aggregated onboard are sent via a
network to a cloud infrastructure or equivalent to perform the
reasoning.
Over the past couple of years, the growing maturity in
deep learning algorithms has led to wider use outside of
its traditional applications in image and natural language
processing, e.g. in detecting malware [38] or rogue certifi-
cates from trusted certificate authorities [39]. It has also been
used to improve intrusion detection accuracy in traditional
computer networks [40], [41], but not for cyber-physical
systems, such as vehicles. An exception is the recent work by
Kang et al. [42], which is geared towards the automotive
industry and detection of attacks on CAN bus. While a
FIGURE 1. Conceptual comparison between onboard and offloaded
intrusion detection for a vehicle.
promising start, the particular work is limited to a generic
command injection attack, which is detected by monitoring
a single type of data source and using a simple and generalist
deep neural network architecture, which does not account for
the overall state of the vehicle through multiple features or for
temporal information (the fact that the impact of the attack
changes over time during the attack). Also, it has been evalu-
ated only in simulation.
III. CONTRIBUTIONS
Here, we progress considerably beyond the state of the art
with the following key contributions:
• We design and evaluate two neural network architectures
for the real-time analysis of multiple sources of data col-
lected periodically onboard the vehicle and representing
both its cyber and physical processes.
• We produce a prototype implementation of deep learn-
ing based intrusion detection for cyber-physical attacks
on a real robotic vehicle, tested for three different types
of attacks and compared against the best-performing
generalist machine learning techniques typically used in
intrusion detection.
• We evaluate both experimentally and using a mathemat-
ical model the practicality of a computational offload-
ing configuration for providing resource-constrained
cyber-physical systems with access to high-end intru-
sion detection.
Note that an early version of this work has been included in
the second author’s PhD dissertation [43]. Here, we expand
through evaluation of two deep learning approaches, a more
practical setup with a single deep learning model for all
attacks rather than individual for each attack, as well as eval-
uation on an unseen attack and an updated literature review.
3494 VOLUME 6, 2018
剩余17页未读,继续阅读
2022-08-03 上传
2022-08-03 上传
2022-08-03 上传
2021-04-06 上传
2021-09-16 上传
2021-03-06 上传
2021-07-07 上传
2021-10-21 上传
2014-02-23 上传
2024-09-26 上传

俞林鑫
- 粉丝: 19
- 资源: 288
 我的内容管理
展开
我的内容管理
展开







最新资源
- 批量文件重命名神器:HaoZipRename使用技巧
- 简洁注册登录界面设计与代码实现
- 掌握Python字符串处理与正则表达式技巧
- YOLOv5模块改进 - C3与RFAConv融合增强空间特征
- 基于EasyX的C语言打字小游戏开发教程
- 前端项目作业资源包:完整可复现的开发经验分享
- 三菱PLC与组态王实现加热炉温度智能控制
- 使用Go语言通过Consul实现Prometheus监控服务自动注册
- 深入解析Python进程与线程的并发机制
- 小波神经网络均衡算法:MATLAB仿真及信道模型对比
- PHP 8.3 中文版官方手册(CHM格式)
- SSM框架+Layuimini的酒店管理系统开发教程
- 基于SpringBoot和Vue的招聘平台完整设计与实现教程
- 移动商品推荐系统:APP设计与实现
- JAVA代码生成器:一站式后台系统快速搭建解决方案
- JSP驾校预约管理系统设计与SSM框架结合案例解析
