视觉-LiDAR融合SLAM技术综述
需积分: 50 108 浏览量
更新于2024-07-15
收藏 749KB PDF 举报
"A Review of Visual-LiDAR Fusion based Simultaneous Localization and Mapping"
本文是一篇文献综述,主要探讨了视觉-LiDAR融合在同时定位与建图(SLAM)中的应用。SLAM是自主导航系统的关键技术,广泛应用于移动机器人、自动驾驶汽车、无人机和水下无人器等领域。视觉SLAM和视觉-IMU SLAM已经得到了深入研究,但LiDAR-SLAM技术的发展相对停滞,尽管融合视觉和LiDAR传感器的数据可以显著提升SLAM性能,特别是在应对剧烈运动、光照不足或视觉特征缺乏的场景。
SLAM的基本思想是构建环境地图的同时估计自身位置,它通常涉及传感器数据的实时处理和映射与定位问题的联合解决。视觉传感器如摄像头提供丰富的环境信息,但易受光照、动态遮挡等因素影响;而LiDAR(光探测和测距)传感器则能提供精确的距离测量,但可能在纹理稀疏区域遇到困难。因此,视觉-LiDAR融合SLAM旨在结合两者的优点,提高系统的鲁棒性和精度。
文献回顾部分详细梳理了SLAM研究的历史和发展,包括早期的视觉SLAM方法,如基于特征的和直接法,以及后来的LiDAR SLAM技术,如基于点云的和基于网格的方法。此外,还重点分析了近年来的视觉-LiDAR融合SLAM算法,如多传感器数据融合策略、特征匹配和数据关联、误差校正模型等。
作者们讨论了各种融合方案,如早期融合、晚期融合和多层次融合,它们分别在不同层次上整合视觉和LiDAR信息。早期融合通常在原始传感器数据层面进行,晚期融合则在更高层次的特征或映射表示上进行。多层次融合则试图在多个层次上结合两种传感器的优势,以实现更优的性能。
此外,文章还涵盖了与视觉-LiDAR融合SLAM相关的挑战,例如传感器同步、数据一致性维护、噪声处理以及计算效率问题。为了克服这些挑战,研究者们提出了多种创新方法,如利用深度学习增强特征提取和匹配,以及采用优化理论来改进估计算法。
这篇综述为读者提供了视觉-LiDAR融合SLAM领域的全面视图,有助于理解当前的研究趋势和技术瓶颈,并为未来的研究方向提供启示。通过深入理解这些技术和方法,开发者和研究者能够更好地设计适用于复杂环境的高精度、高鲁棒性的自主导航系统。
Sensors 2020, 20, 2068 4 of 20
Feature
extraction
Matching
yes
no
Predict
Raw data
Robot state
Map state
Raw data
Proprioceptive
Exteroceptive
f eature
Map new
Update
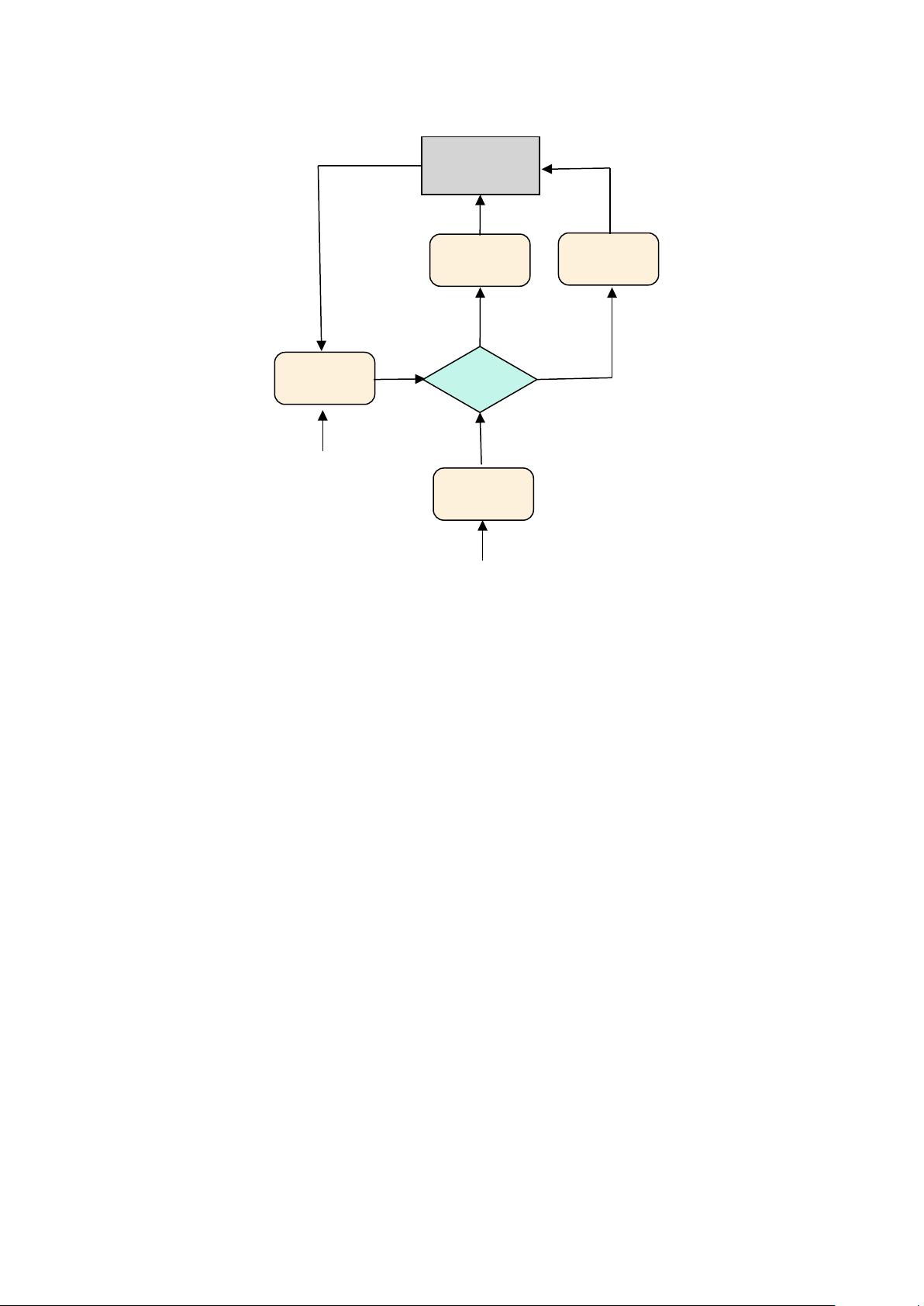
Figure 1.
Block diagram of the EKF-SLAM process. When exteroceptive data are coming at time
t
,
the state of the robot is predicted at this time with Equation (5), and the detected features are matched
with those in the map. The matches allow updating the state and map using Equation (6). If the
detection is not in the map, it is initialized when possible and added to the map. This process is done
recursively (see Equation (7)).
2.2. Probabilistic Solution of the SLAM Framework
As seen before, SLAM is a recursive estimation process. Such a process is often viewed in a
probabilistic way in which the classical prediction and update step must be fulfilled.
Considering a robot moving through an unknown environment, we define:
• x
k
: the state vector describing the robot at time k
• x
k|k−1
: the estimated state vector at time k given the knowledge of the previous state
• u
k
: the control vector applied at k − 1 to move the vehicle to a state x
k
(if provided)
• m
i
: a vector describing the i
th
landmark
• z
k,i
: an observation of the i
th
landmark taken at time k
• X: the set of vehicle locations from Time 0 to k
• U
0:k
: the set of control inputs from Time 0 to k
• Z
0:k
: the set of observations from Time 0 to k
• M: the set of landmarks or maps
• M
k|k−1
: the estimated map at time k given the knowledge of the previous map at time k − 1.
As we consider the probabilistic form of SLAM, at each time
k
, we want to compute the probability
distribution function:
P(x
k
, M|Z
0:k
, U
0:k
) (4)
To proceed, we have to use a recursive solution that uses the a priori
P(x
k−1|k−1
, M
k−1|k−1
|Z
0:k−1
, U
0:k−1
) being updated by u
k
and z
k
.
剩余19页未读,继续阅读
135 浏览量
166 浏览量
103 浏览量
150 浏览量
2023-09-13 上传
236 浏览量
135 浏览量
2022-08-04 上传
498 浏览量

刀耕火种why
- 粉丝: 155
 我的内容管理
展开
我的内容管理
展开







最新资源
- Homebridge Xbox电视插件:实现微软游戏机的HomeKit控制
- Code.js:打造前端开发中的语法高亮显示
- Java实现GDP经济地图可视化分析
- 解决Office 2003无法打开Office 2007文件的问题
- 使用Python实现K-Means进行文本聚类分析
- CentOS虚拟机模板使用指南及开源项目介绍
- Java实现的飞行模拟游戏项目
- 深入探究Windows 32位API的查询与应用
- 全面破解:U盘PE系统维护与分区工具教程
- Firefox OS NFC应用开发与远程内容加载实践
- Dart软件包管理器Pub的贡献指南与组织架构
- Spy4win8在Windows 8上的完美兼容性验证
- MySQL 5.7.16解压版:一键启动,简化数据库部署流程
- AMScrollingNavbar:Objective-C实现可滚动的UINavigationBar
- MYSQL培训经典教程 - 易学好用的数据库教程
- 探索CityGen道路插件:增强草图大师的道路生成功能
