TORCS竞赛软件手册:自动驾驶模拟与AI控制设计指南
需积分: 7 102 浏览量
更新于2024-07-09
收藏 339KB PDF 举报
TORCS官方手册是一份详细的指南,针对SimulatedCarRacingChampionship这一国际性的比赛软件进行阐述。该比赛在进化计算和计算智能与游戏领域的重要会议上举行。手册的目的是为了帮助参赛者理解并利用这个模拟赛车竞技平台进行自动控制系统的研发。
比赛的核心是设计一个能够在预设的赛道上进行竞争的赛车控制器,这些赛道对于参赛者来说是未知的,这要求控制器具有高度的适应性和学习能力。TORCS(The Open Racing Car Simulator)是一个开源的自动驾驶模拟器,特别适合强化学习的研究,因为它提供了丰富的环境反馈和实时的赛车模拟,让参赛者可以通过模拟驾驶和学习来改进算法。
手册首先介绍了软件的整体架构,包括其模块划分、数据流和交互机制,以便开发者能够有效地集成和扩展他们的算法。安装步骤详尽地说明了如何在不同的操作系统上配置和运行TORCS,这对于新手和经验丰富的参赛者都至关重要。
此外,手册还深入讲解了车辆模型中的传感器(如摄像头、雷达、陀螺仪等)和执行器(如引擎控制、刹车、转向)的细节,这涉及到如何在比赛中利用这些传感器输入来做出决策,以及如何通过执行器来实现赛车的动作控制。这些传感器和执行器的精确描述有助于参赛者了解如何模拟真实世界中的驾驶体验,并在此基础上构建复杂的决策策略。
强化学习部分是手册的一个关键焦点,因为TORCS提供了一个理想的环境来测试和优化基于强化学习的控制算法。参赛者可以使用Q-learning、深度Q-networks(DQN)、策略梯度等方法训练AI驾驶员,使其通过与环境的互动不断学习和改进,以求达到最佳的比赛性能。
最后,手册还包括竞赛规则、提交代码的格式要求以及评估标准,确保所有参赛者对比赛的公平性和期望有清晰的理解。这份全面的手册不仅对专业研究人员和竞赛参与者有价值,也对任何对自动驾驶技术或强化学习感兴趣的人士提供了深入学习和实践的宝贵资源。
TORCS
BOT
Server
Game Engine
...
BOT
Server
Client
Controller
Client
Controller
Sensors & Actuators Model
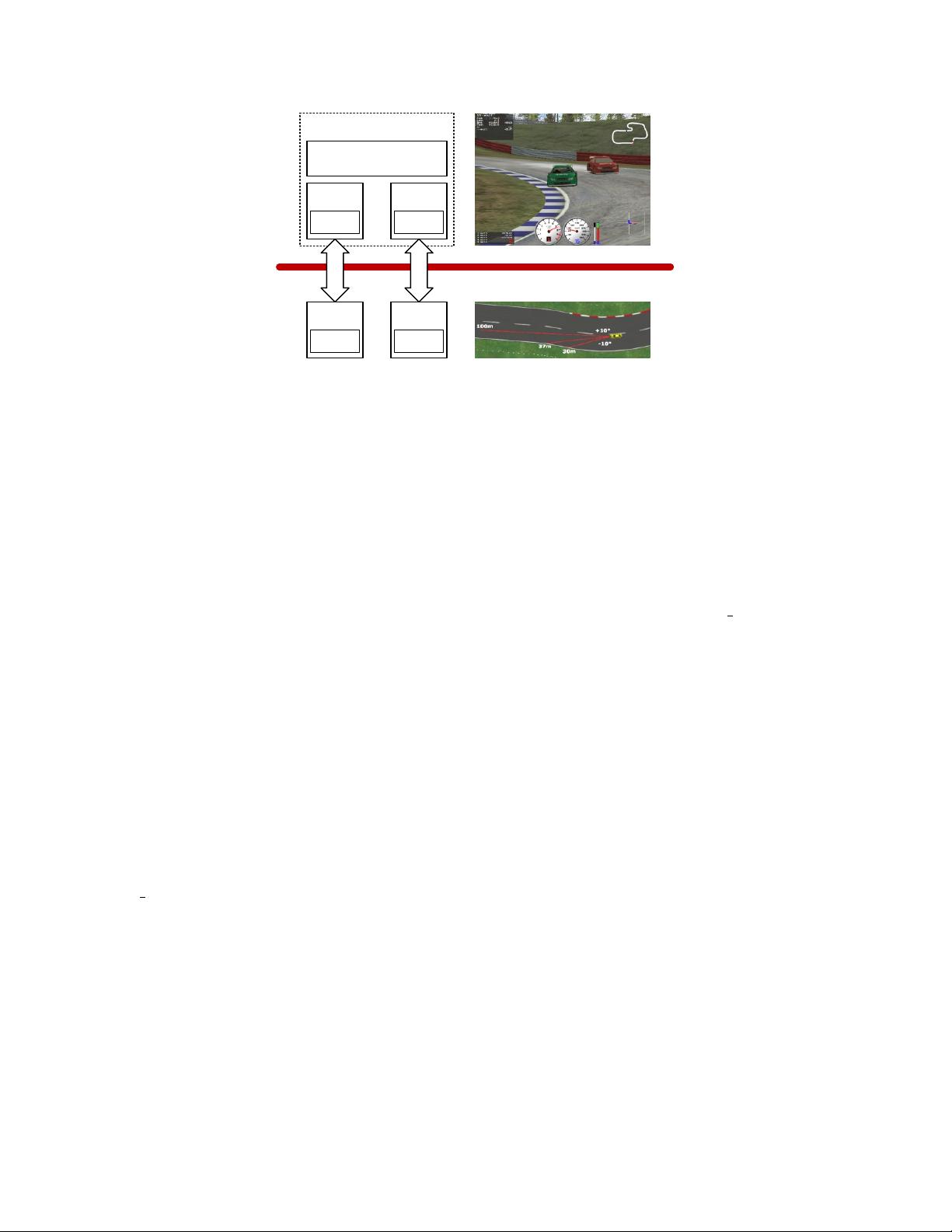
Figure 1: The architecture of the competition software.
corresponding to 20ms of simulated time), the server sends the current sensory inputs to each bot
and then it waits for 10ms (of real time) to receive an action from the bot. If no action arrives,
the simulation continues and the last performed action is used. Finally, the competition software
creates a physical separation between the driver code and the race server building an abstraction
layer, a sensors and actuators model, which (i) gives complete freedom of choice regarding the
programming language used for bots and (ii) restricts the access only to the information defined
by the designer.
The architecture of the competition software is shown in Figure 1. The game engine is the
same as the original TORCS, the main modification in a new server-bot, called scr server, which
manages the connection between the game and a client bot using UDP. A race involves one server-
bot for each client; each server-bot listens on a separate port of the race server. At the beginning,
each client-bot identifies itself to a corresponding server-bot establishing a connection. Then, as
the race starts, each server-bot sends the current sensory information to its client and awaits for an
action until 10ms (of real time) have passed. Every game tic, corresponding to 20ms of simulated
time, the server updates the state of the race which is sent back to the clients. A client can request
a race restart by sending a special action to the server.
3 Installing the Competition Server
To provide a very accessible interface to TORCS we developed two modules to run TORCS in a
client/server architecture. The server has been developed by providing a specific bot driver called
scr server that, instead of having its own intelligence, sends the game state to a client module
and waits for a reply, i.e., an action to be performed by the controller. So to begin the competition,
we first need to install TORCS and the competition server-package provided in this bundle.
3.1 Linux Version
Download the all-in-one TORCS 1.3.4 source package from SourceForge (http://sourceforge.
net/projects/torcs/) or directly from here. To compile the server you will need:
• Hardware accelerated OpenGL (usually provided by your Linux distribution)
3
剩余14页未读,继续阅读
2021-02-11 上传
2021-05-26 上传
2022-09-24 上传
2022-09-20 上传
2021-03-05 上传
2021-08-18 上传
2021-08-18 上传

乘雷欲上天
- 粉丝: 88
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
