RecurDyn低机动履带车教程:Track_LM版权与使用指南
版权申诉
低机动履带式车辆教程(Track_LM)是一份由Function Bay, Inc.发布的专业文档,专注于在RecurDyn软件平台上模拟和设计低机动性履带式车辆的运动行为。这份教程是版权受保护的,依据韩国和其他国家的版权法进行管理,并受到许可协议的约束,规定了用户对文档的复制、披露和使用的限制。用户仅限于在内部或个人用途下,按照软件许可协议的规定,打印从软件介质获取的文档副本,并需包含Function Bay, Inc.的版权通知和其他所有专有标识。
教程内容涵盖了低机动履带车辆的基础理论,包括但不限于车辆结构分析、行走原理、动力系统设计、摩擦力与稳定性控制、以及在复杂地形下的运动建模。它强调了在实际应用中的安全性考虑,尤其是在物联网(IoT)环境中,如何确保车辆的通信安全、数据隐私以及远程操作的可靠性。
由于文档主要用于提供一般性的信息,其内容可能会随着技术发展和新发现而更新,因此用户必须注意信息的时效性和适用性。任何未经Function Bay, Inc.书面同意,未经授权的电子传播、修改或公开发布都是严格禁止的。这份教程对于希望深入理解履带式车辆工程和使用RecurDyn进行模拟分析的专业人士来说,具有很高的价值和实用性。
低机动 履 带 式 车 辆 教 程(T R A C K _ L M )
8
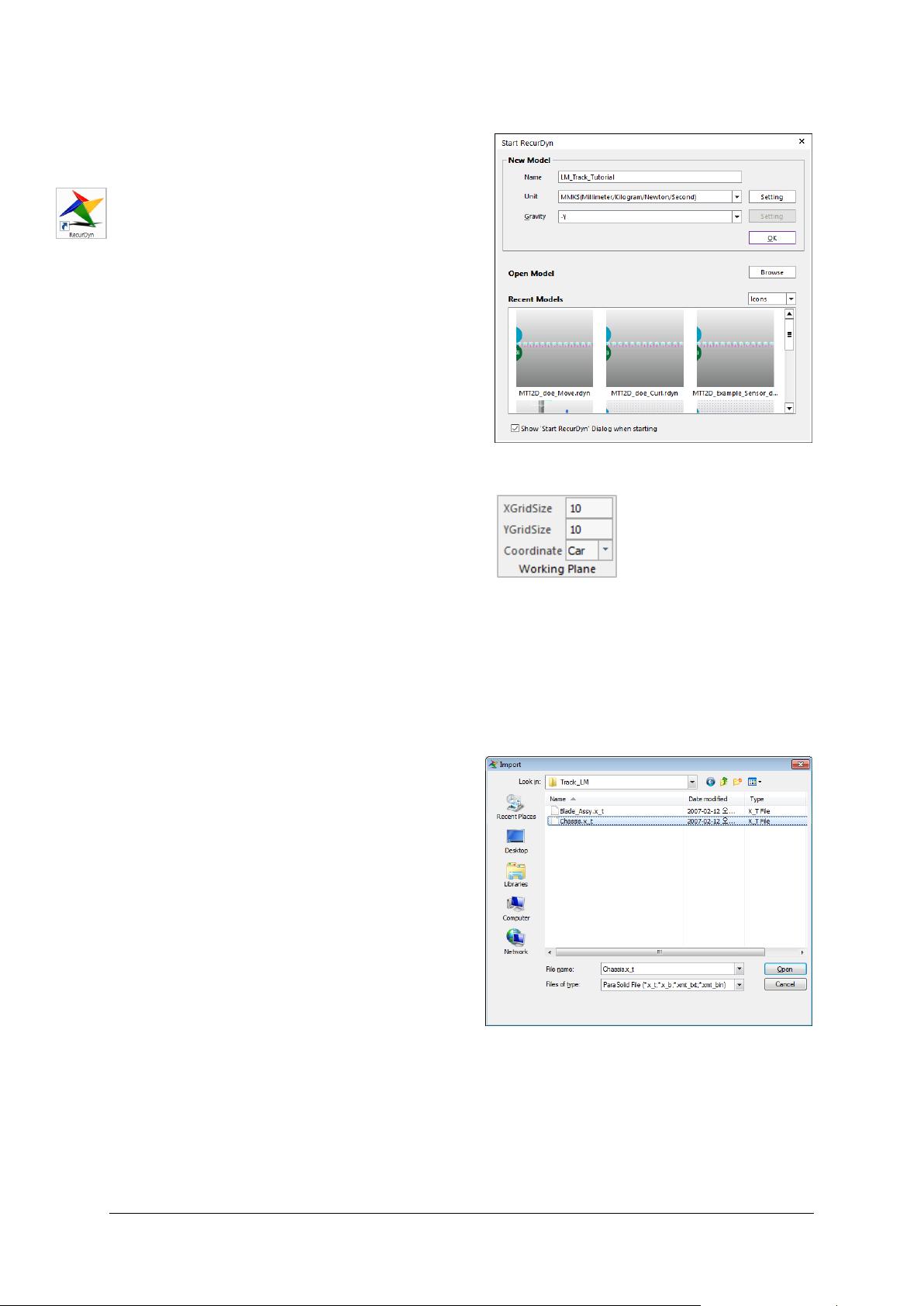
启动 RecurDyn
启动 RecurDyn,并创建新模型:
1. 双击桌面上的 RecurDyn 图标。
RecurDyn 启动,并弹出 Start RecurDyn
对话框。
2. 确保单位和右图 Start RecurDyn 对话框相
同,如果没有,点击 MMKS。
3. 改变模型名称为 LM_Track_Tutorial,并点
击 OK。
4. 设置网格间距为 10mm。
导入底盘几何体
通过导入已经完成的推土机底盘几何体,对履带车辆进行建模。
导入底盘几何:
1. 在 File 菜单,选择 Import。
2. 在 Open 对话框,设置文件类型为
ParaSolid 文件,在 Track LM Files 文
件夹,选择 Chassis.x_t,如右图所示。
(文件路径:<Install Dir>
/Help/Tutorial/Toolkit/Track_LM/Lo
wMobilityTrackedVehicle)
3. 点击 Open。

剩余40页未读,继续阅读

少年小鱼
- 粉丝: 31
- 资源: 528
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
