机器人路径规划:A*与D*算法详解
"这篇资料详细介绍了路径规划中的几种算法,包括Dijkstra、A*和D*,以及D*的各种变体。这些算法在机器人运动规划领域广泛应用,旨在找到未知、部分已知或已知环境中的两点间最优化路径。资料中通过实例逐步解析了每个算法的工作原理和性能指标,如完备性、最优性、空间复杂度和时间复杂度。"
在路径规划领域,搜索算法是至关重要的工具,它们帮助机器人或系统在复杂环境中寻找从起点到终点的最短或最优路径。资料首先概述了搜索技术的基本概念,接着详细讲解了以下几种算法:
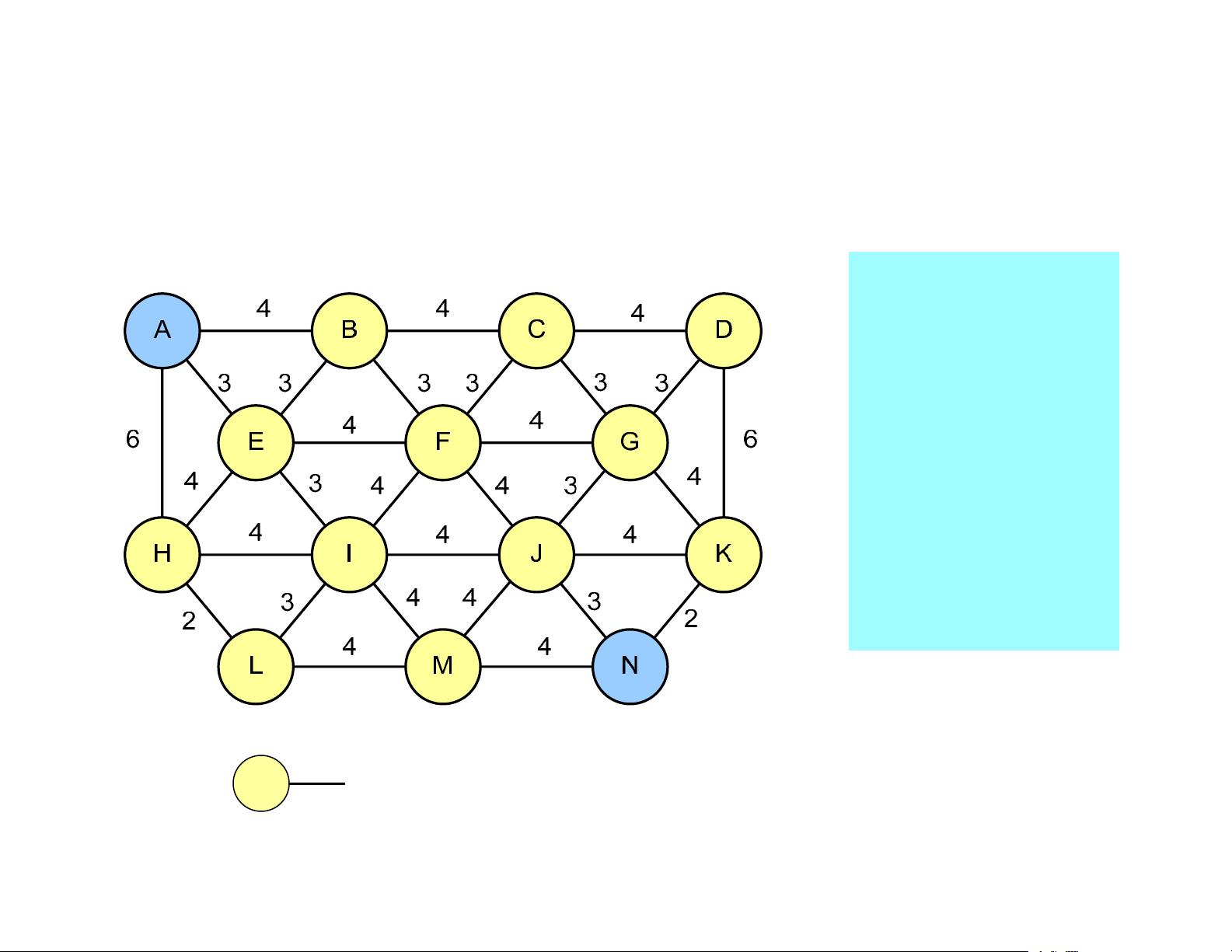
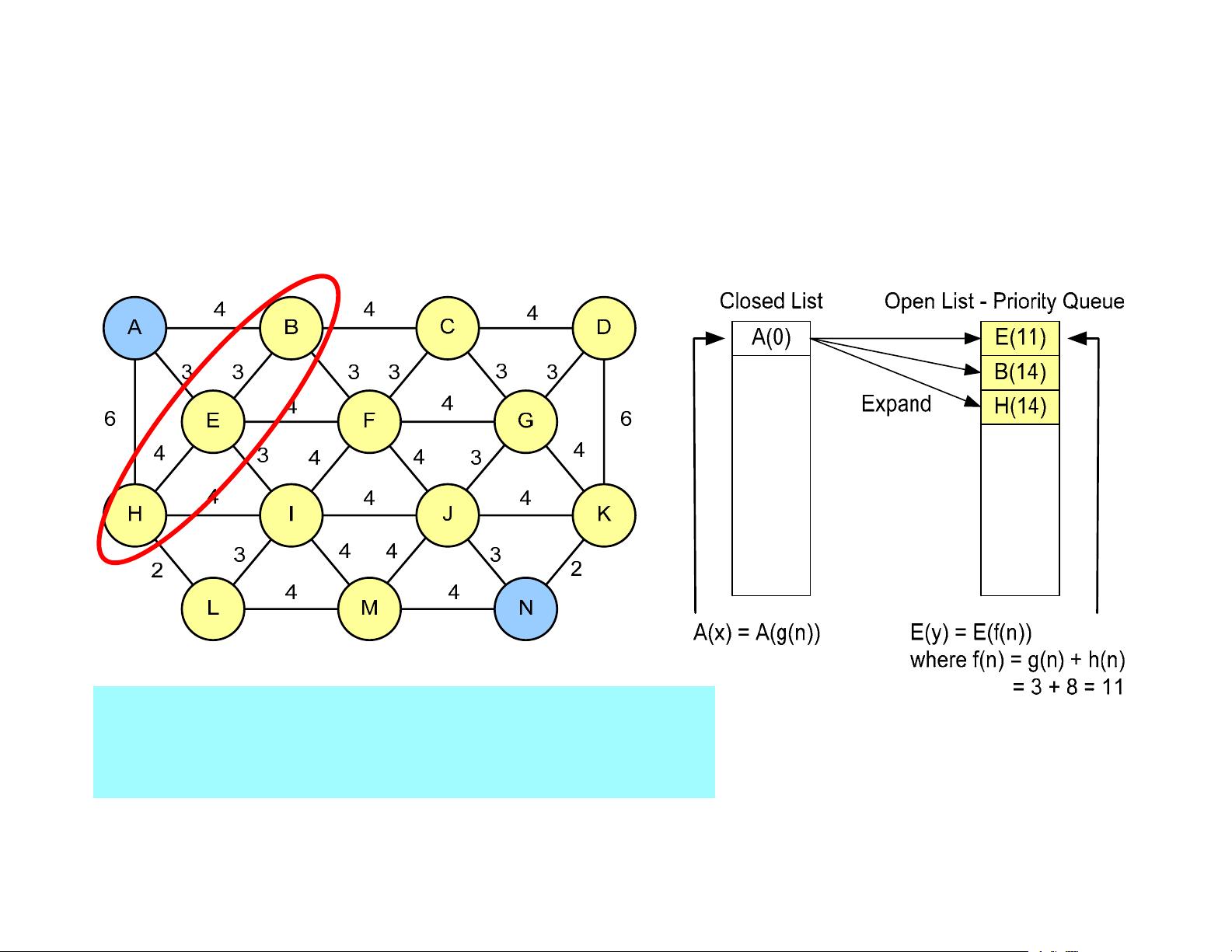
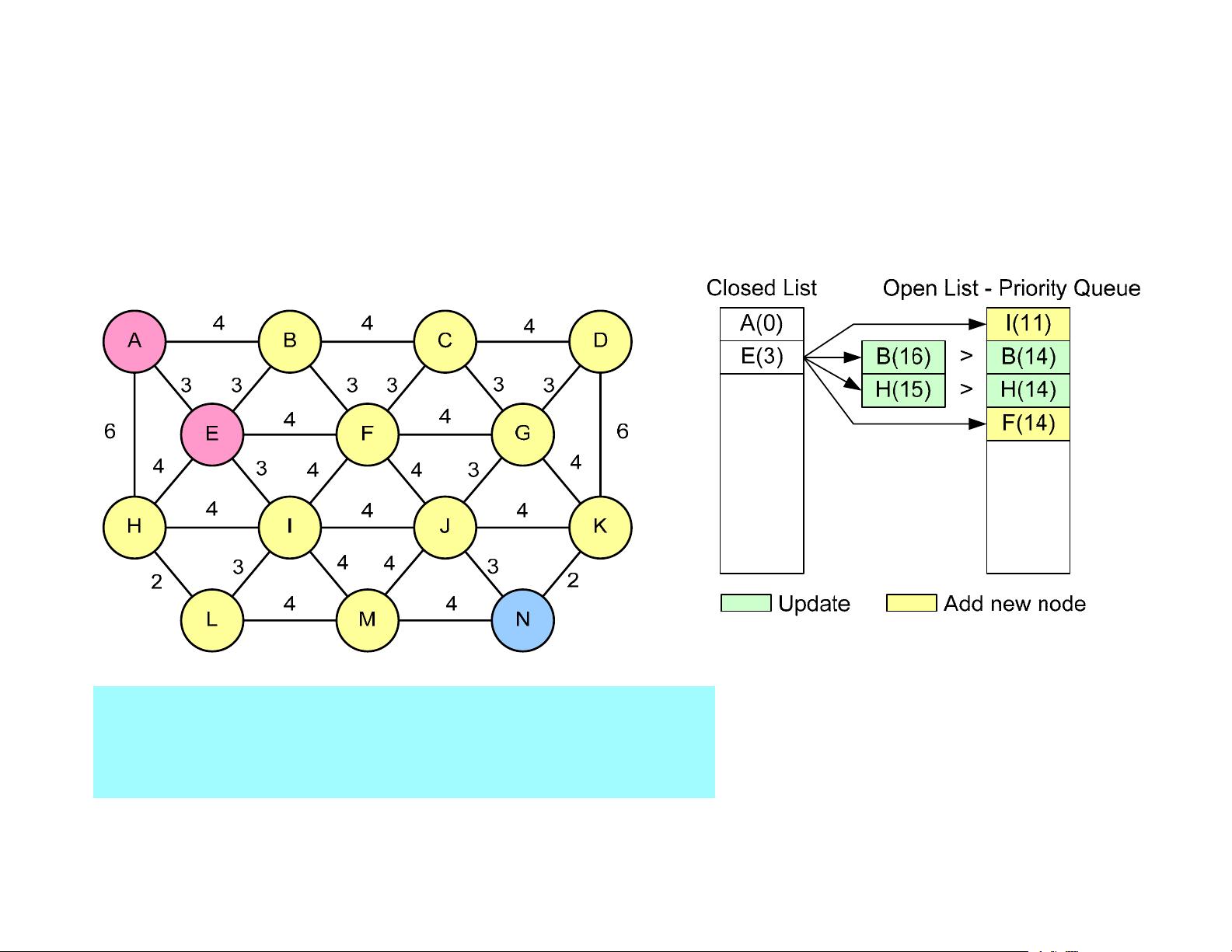
1. **A* 搜索**:
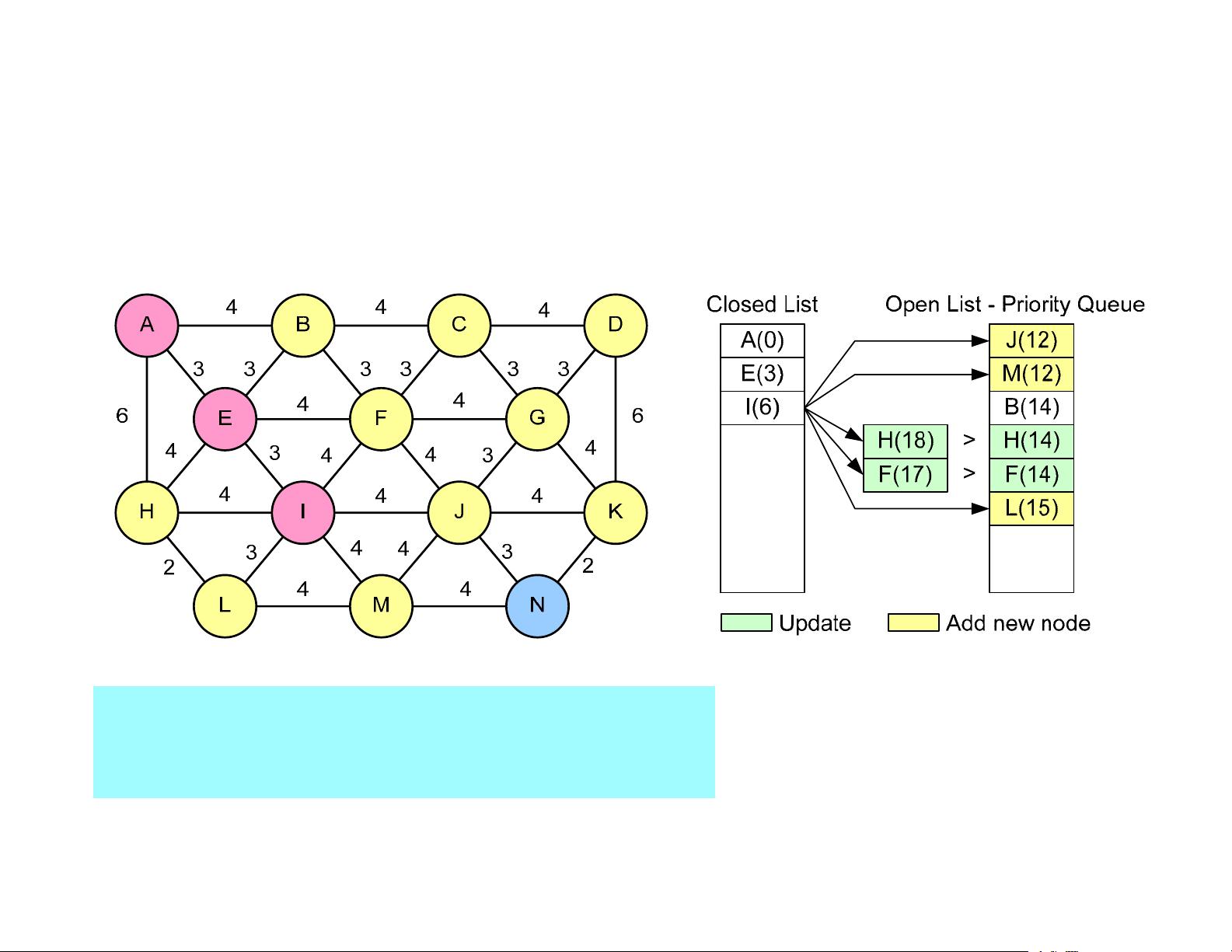
A* 是一种启发式搜索算法,它结合了盲目搜索(如广度优先搜索BFS)和有信息搜索的优点。A* 的关键在于使用评估函数 `f(n) = g(n) + h(n)`,其中 `g(n)` 表示从起点到当前节点的实际代价,`h(n)` 是从当前节点到目标节点的启发式估计代价。通过这种方式,A* 能够优先探索最有希望到达目标的路径,从而提高效率。
2. **D* 搜索**:
D* 算法是在动态环境下进行路径规划的一种方法,它允许环境发生变化时更新路径。D* 的核心是动态调整代价估计,保持路径最优。与A* 相比,D* 更加关注于路径的实时更新,而非首次规划的效率。
3. **D* Lite**:
D* Lite(也称为D*-Lite)是D* 的一个简化版本,它降低了计算需求,更适合于资源有限的环境。尽管牺牲了一些灵活性,但D* Lite 在计算复杂性和实用性之间找到了平衡,特别适用于实时路径规划问题。
搜索算法的性能通常由以下几个方面衡量:
- **完备性**:算法是否能确保在所有情况下找到从起点到终点的路径。
- **最优性**:算法找到的路径是否是最优的,即具有最低代价。
- **空间复杂度**:算法在内存中占用的空间,这关系到算法在大规模问题上的可行性。
- **时间复杂度**:算法执行的时间,决定了算法的效率。
对于机器人运动规划,选择合适的搜索算法至关重要,因为它直接影响着机器人的决策速度和路径质量。通过深入理解这些算法,开发者可以针对具体场景选择最适合的路径规划策略。
16
Example (5/5)
C(4)
A(4)
B(3)
A(4)
I(5)
G(7)
C(4)
H(3)
No expansion
F(7)
C(4)
I(5)
G(7)
D(5)
E(3)
GOAL(5)
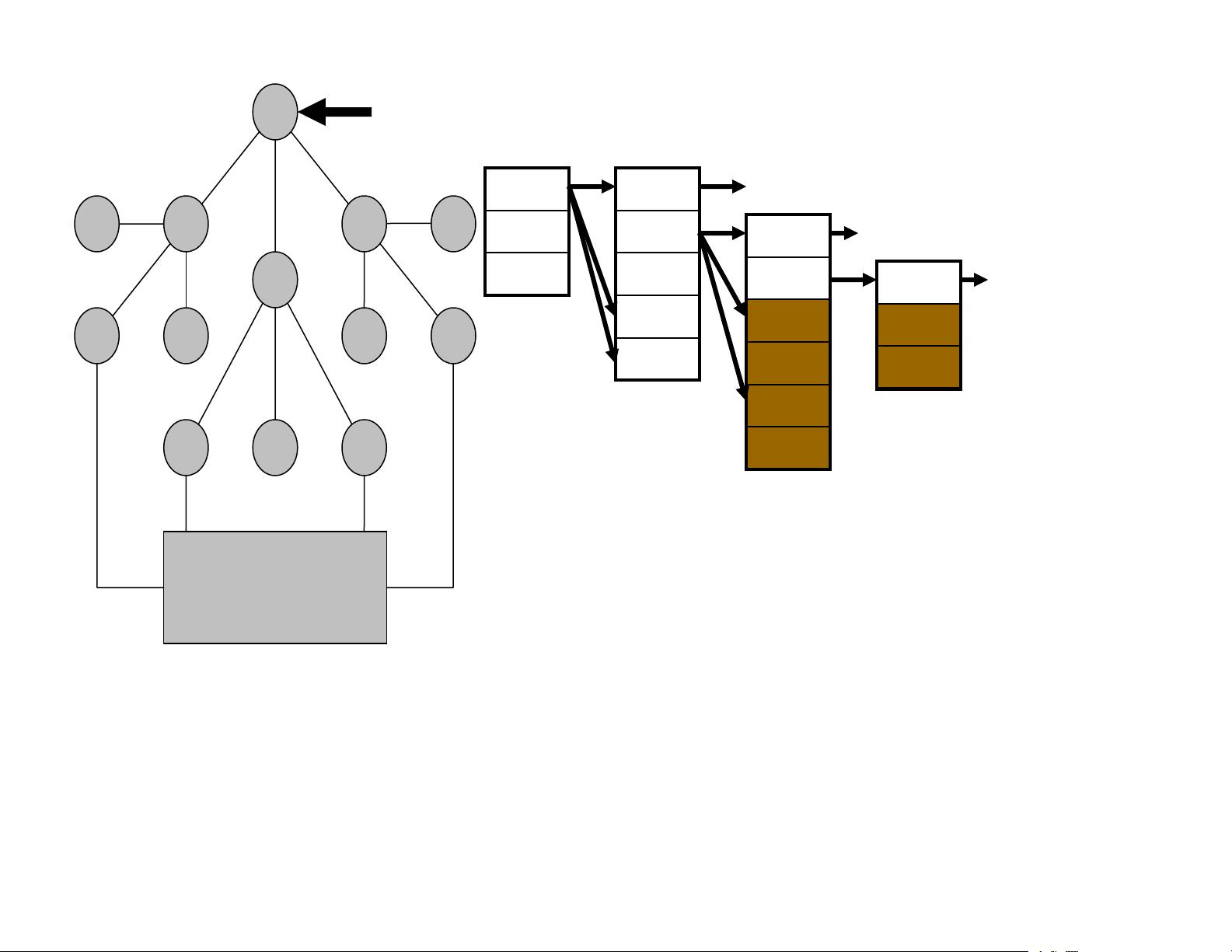
We can continue to throw away nodes with
priority levels lower than the lowest goal found.
As we can see from this example, there was a
shorter path through node K. To find the path, simply
follow the back pointers.
Therefore the path would be:
Start => C => K => Goal
L(5)
J(5)
K(4)
GOAL(4)
If the priority queue still wasn’t empty, we would
continue expanding while throwing away nodes
with priority lower than 4.
(remember, lower numbers = higher priority)
GOAL
3
33
3
3
3 3
1
1 22
3
3
3
2
2
0
Start
2
2
4
1
1
11
1
11
1
1
A
B
CD
EF
GH I
JK
L
剩余131页未读,继续阅读
2019-04-25 上传
2021-02-27 上传
2021-02-14 上传
2013-06-14 上传
2023-05-14 上传
2023-05-14 上传
2023-08-20 上传

DJ丶丶
- 粉丝: 69
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







