




ARM服务器虚拟化:性能与架构影响分析
"这篇研究论文深入探讨了ARM架构在虚拟化环境下的性能表现及其对架构的影响,重点关注了KVM和Xen两个主流ARM和x86平台的hypervisor。研究首次展示了ARM硬件针对虚拟化的支持如何大幅提高VM与hypervisor之间的切换速度。然而,当前的hypervisor设计,无论是Type 1(如Xen)还是Type 2(如KVM),都无法充分利用这种性能提升来优化实际应用工作负载的性能。"
ARM虚拟化技术在服务器领域的普及带来了对ARM平台虚拟化性能研究的需求。该研究通过实测多核环境下KVM和Xen在ARM硬件上的性能,揭示了ARM硬件的虚拟化支持如何提高了虚拟机与hypervisor之间快速切换的能力。这主要得益于ARM架构中的虚拟化扩展,例如硬件辅助的内存管理单元(MMU)和处理器状态切换机制,这些使得虚拟机的创建、销毁以及上下文切换等操作更为高效。
尽管如此,论文指出,现有的hypervisor软件设计并未充分利用这些硬件加速特性。原因包括:(1) hypervisor的内核开销,尤其是调度和内存管理方面的复杂性;(2) 虚拟化层的额外拷贝和转换操作降低了数据传输效率;(3) 对于ARM架构特性的优化不足,如中断处理和I/O虚拟化的处理方式可能不适用于ARM平台。
作者分析了这些问题并提出,为了提高整体性能,需要对hypervisor的软件设计和实现进行改进,包括优化调度策略,减少不必要的数据拷贝,以及更好地利用ARM硬件特性,如硬件辅助的I/O虚拟化。此外,针对ARM架构的定制化设计可能也是提升虚拟化性能的关键,比如改进的页表结构和更高效的中断处理机制。
这篇论文揭示了ARM虚拟化在性能上的潜力与挑战,强调了未来需要更多针对ARM架构优化的hypervisor设计,以充分发挥其在服务器环境中的优势。对于开发人员和系统架构师来说,理解和解决这些挑战将有助于推动ARM在数据中心和云计算领域的广泛应用。
Xen
Dom0
Kernel
VM
Userspace Userspace
Kernel
EL0
EL1
EL2
Backend
Device
Frontend
Driver
Virtio I/O
vGIC
Figure 2: Xen ARM Architecture
Host OS
Kernel
KVM
KVM
VM
Userspace Userspace
Kernel
EL0
EL1
EL2
vGIC
Virtio
Device
Virtio
Driver
Virtio I/O
Figure 3: KVM ARM Architecture
come the limitation that the ARM architecture was not
classically virtualizable [8]. All server and networking class
ARM hardware is expected to implement these extensions.
We provide a brief overview of the ARM hardware vir-
tualization extensions and how hypervisors leverage these
extensions, focusing on ARM CPU virtualization support
and contrasting it to how x86 works.
The ARM virtualization extensions are centered around
a new CPU privilege level (also known as exception level),
EL2, added to the existing user and kernel levels, EL0 and
EL1, respectively. Software running in EL2 can configure
the hardware to support VMs. To allow VMs to interact
with an interface identical to the physical machine while
isolating them from the rest of the system and preventing
them from gaining full access to the hardware, a hypervisor
enables the virtualization features in EL2 before switching to
a VM. The VM will then execute normally in EL0 and EL1
until some condition is reached that requires intervention of
the hypervisor. At this point, the hardware traps into EL2
giving control to the hypervisor, which can then interact
directly with the hardware and eventually return to the VM
again. When all virtualization features are disabled in EL2,
software running in EL1 and EL0 works just like on a system
without the virtualization extensions where software running
in EL1 has full access to the hardware.
ARM hardware virtualization support enables traps to EL2
on certain operations, enables virtualized physical memory
support, and provides virtual interrupt and timer support.
ARM provides CPU virtualization by allowing software in
EL2 to configure the CPU to trap to EL2 on sensitive
instructions that cannot be safely executed by a VM. ARM
provides memory virtualization by allowing software in
EL2 to point to a set of page tables, Stage-2 page tables,
used to translate the VM’s view of physical addresses to
machine addresses. When Stage-2 translation is enabled,
the ARM architecture defines three address spaces: Virtual
Addresses (VA), Intermediate Physical Addresses (IPA), and
Physical Addresses (PA). Stage-2 translation, configured in
EL2, translates from IPAs to PAs. ARM provides interrupt
virtualization through a set of virtualization extensions to
the ARM Generic Interrupt Controller (GIC) architecture,
which allows a hypervisor to program the GIC to inject
virtual interrupts to VMs, which VMs can acknowledge
and complete without trapping to the hypervisor. However,
enabling and disabling virtual interrupts must be done in
EL2. Furthermore, all physical interrupts are taken to EL2
when running in a VM, and therefore must be handled
by the hypervisor. Finally, ARM provides a virtual timer,
which can be configured by the VM without trapping to the
hypervisor. However, when the virtual timer fires, it raises a
physical interrupt, which must be handled by the hypervisor
and translated into a virtual interrupt.
ARM hardware virtualization support has some similari-
ties to x86
1
, including providing a means to trap on sensitive
instructions and a nested set of page tables to virtualize
physical memory. However, there are key differences in how
they support Type 1 and Type 2 hypervisors. While ARM
virtualization extensions are centered around a separate CPU
mode, x86 support provides a mode switch, root vs. non-root
mode, completely orthogonal from the CPU privilege rings.
While ARM’s EL2 is a strictly different CPU mode with its
own set of features, x86 root mode supports the same full
range of user and kernel mode functionality as its non-root
mode. Both ARM and x86 trap into their respective EL2
and root modes, but transitions between root and non-root
mode on x86 are implemented with a VM Control Structure
(VMCS) residing in normal memory, to and from which
hardware state is automatically saved and restored when
switching to and from root mode, for example when the
hardware traps from a VM to the hypervisor. ARM, being
a RISC-style architecture, instead has a simpler hardware
mechanism to transition between EL1 and EL2 but leaves it
up to software to decide which state needs to be saved and
restored. This provides more flexibility in the amount of
work that needs to be done when transitioning between EL1
and EL2 compared to switching between root and non-root
mode on x86, but poses different requirements on hypervisor
software implementation.
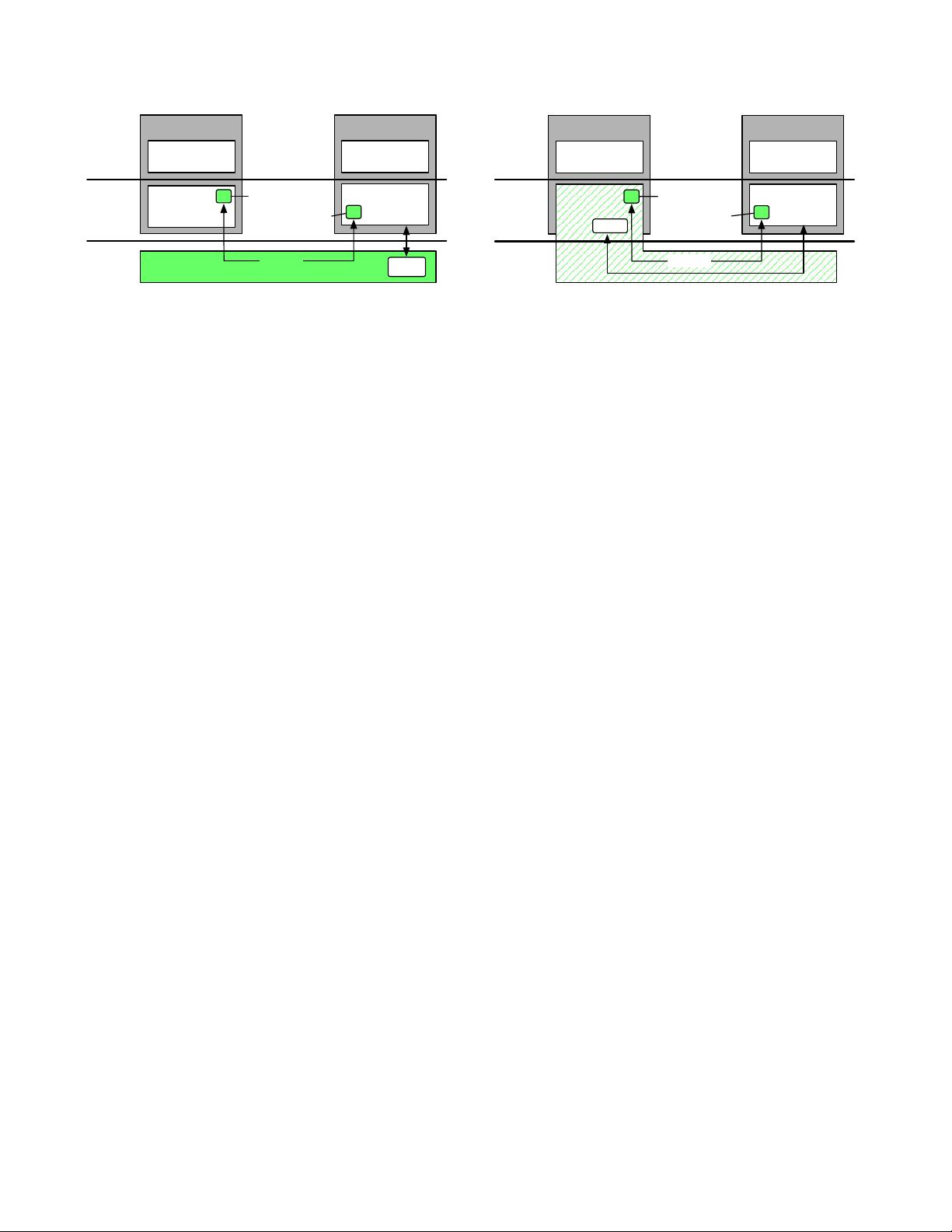
ARM Hypervisor Implementations. As shown in Fig-
ures 2 and 3, Xen and KVM take different approaches to
using ARM hardware virtualization support. Xen as a Type 1
hypervisor design maps easily to the ARM architecture, run-
1
Since Intel’s and AMD’s hardware virtualization support are very
similar, we limit our comparison to ARM and Intel.
下载后可阅读完整内容,剩余12页未读,立即下载
467 浏览量
406 浏览量
2009-06-11 上传
135 浏览量
2012-06-30 上传
124 浏览量
114 浏览量
2021-05-20 上传
2021-05-29 上传

whut0000
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开








最新资源
- Oracle财务系统培训:详解应付账款处理
- 郑君里《信号与系统》第二版习题详解
- 封装iOS滑动选择器组件,助力金融类应用金额选择
- 探索HelloAndroid:安卓应用开发实战源码剖析
- 探索QQ会员登陆GTK算法的核心机制
- Ruby基础:构建CRUD Web应用bitfolio指南
- Oracle财务系统应用基础培训教程
- SQL Server 2000 JDBC驱动及JTDs包下载
- 和众物流管理软件v1.0:陆运物流企业的操作与财务工具
- FLASH游戏制作课件:生动且实用的教学工具
- Android源码学习资料下载指南
- Python Plotly-Dash实现全球恐怖主义仪表板教程
- 自定义标题的滑动菜单视图iOS组件
- 使用jtopo插件实现自动拓扑生成的案例解析
- JSP网上书店开发教程完整案例分析
- 安卓游戏引擎开发:实现与源码解析






















