MATLAB实现的机器人柔性手臂控制系统设计
版权申诉
"基于MATLAB的机器人柔性手臂控制系统设计"
在现代工业自动化领域,机器人技术发挥着至关重要的作用,而机器人柔性手臂作为其核心组成部分,具有高度的灵活性和适应性。本文将深入探讨基于MATLAB的机器人柔性手臂控制系统的设计,该系统能够实现对机器人手臂的精确控制和动态模拟。
首先,设计过程中首要的任务是确定柔性手臂的自由度。自由度是衡量机器人动作灵活程度的指标,它决定了机器人可以独立运动的关节数量。在本设计中,自由度的设置是关键,因为它直接影响到机器人手臂的工作范围和操作精度。
接下来是机械设计阶段,这一阶段包括了手臂结构的设计和优化。柔性手臂通常由多个连杆和关节组成,需要考虑材料的选择、关节类型、尺寸以及手臂的刚度等因素。设计时需确保手臂在执行任务时既能够保持足够的强度,又具备良好的柔韧性,以适应各种复杂的工作环境。
在控制系统设计中,MATLAB作为一个强大的数学计算和仿真平台,被广泛应用于机器人控制系统的开发。通过MATLAB,可以构建运动模型,进行动力学分析,以便精确地模拟手臂的运动行为。同时,MATLAB的Simulink工具箱可以方便地实现控制算法的建模和仿真,如PID控制、滑模控制等,这些算法对于保证手臂的稳定运动和精确定位至关重要。
在硬件系统层面,传感器的选择和配置是控制系统的重要环节。例如,位置传感器用于检测关节的位置,力/扭矩传感器用于感知手臂受到的负载,这些数据将反馈给控制系统进行实时调整。此外,动力源的选择也会影响机器人的性能,电动机、液压或气压系统等都是常见的动力选项,需要根据具体需求和设计条件来决定。
软件架构方面,控制系统通常采用分层结构,包括上位机和下位机。上位机负责高级决策和路径规划,下位机则负责低级控制和实时响应。MATLAB的代码可以被转换为可执行的嵌入式代码,部署在下位机的微控制器上,实现对机器人手臂的实时控制。
最后,设计中提到的待改进之处可能涉及到控制系统性能的提升、能源效率的优化、以及传感器集成的改进等。这些问题可以通过引入更先进的控制策略、采用新型传感器技术或优化能源管理来解决。
基于MATLAB的机器人柔性手臂控制系统设计是一个涉及多学科的综合性工程,涵盖了机械设计、控制理论、传感器技术和软件编程等多个方面。通过这样的设计,可以为未来的实际应用提供一个可靠的、高性能的机器人手臂控制系统。

第二章机器人手臂总体结构设计
2.1 机器人柔性手臂设计原则
项目中手臂能实现各种不同的简单动作,要求成本低廉,功能简单,故在保证性
能的情况下,我们采用低廉的材料和元器件。
综合而言我们有以下数条设计原则:
1)经济性:在保证性能的前提下采用简单的方案,使用低廉的材料和元器件:
2)可靠性:机器人的工作环境一般而言比较恶略,因此对机器人控制系统质量很
重要。
3)易维护性;机械上采用模块化设计方法,减少零部件种类。
4)强壮性:机器人的手臂都是由各个关节链接起来的,应有较好的刚性,较小的
传动间隙,不会导致重大的机械变形,各种接插件也不能松动、脱落。
2.2 总体结构设计
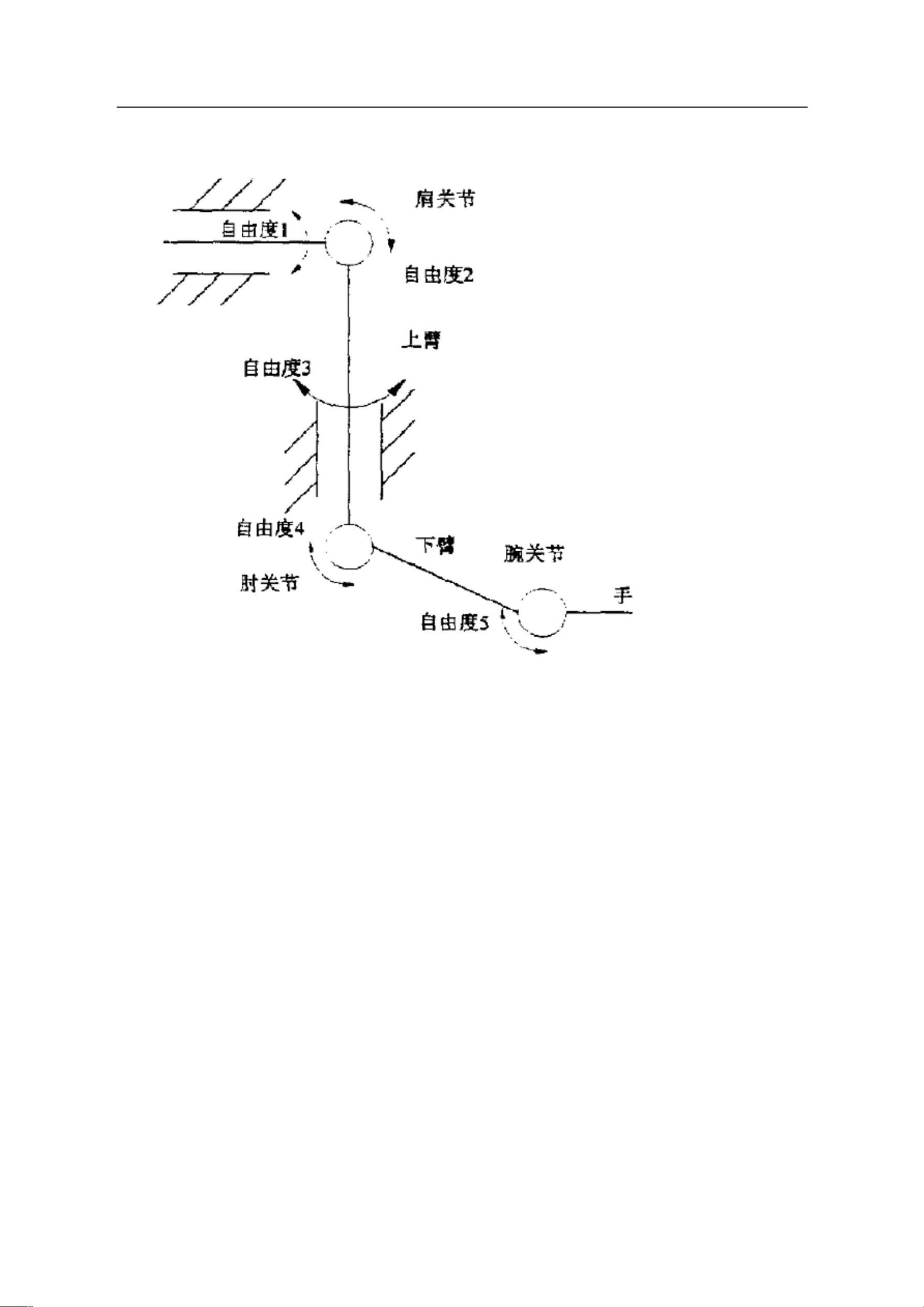
2.2.1 机器人手臂自由度确定和关节设置
手臂自由度的多少决定了机器人的潜力。自由度设置过少,机器人的动作就会太
过僵硬甚至难以实现。所以关节自由度数目不能太少,但应该在能够满足基本动作的
前提下,尽可能的去减少关节自由度,所以关节自由度应该适当确定。。设人体所在
的坐标系的 x 轴指向人的正前方向,y 轴指向左侧方向,z 轴垂直向上。
7
剩余44页未读,继续阅读
2023-10-11 上传
2022-11-03 上传
2023-09-11 上传
2022-10-15 上传
2023-09-08 上传
2023-03-22 上传

xxpr_ybgg
- 粉丝: 6798
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- mail-server-directory:创建用于跟踪公共邮件服务器的旧网站
- ufhealth-require-image-alt-tags:WordPress插件要求所有插入的图像都带有ALT标签
- one-dark-terminal:基于One Dark for Atom的OSX Terminal主题
- 锤子便签样式actionSheet(iOS源代码)
- node-express-course:Node.js和Express.js服务器简介
- awesome-community-detection:精选的社区检测研究论文及其实施清单
- gritter:此Ruby on Rails宝石可让您使用名为“ gritter”的jQuery插件轻松向您的应用程序添加类似Growl的通知
- Ultros-site:Ultros站点的站点代码
- 基于MapReduce实现的朴素贝叶斯分类器.zip
- htmlbook-style-editor:一个基于浏览器的实时CSS编辑器,用于HTMLBook样式
- XAF_treelisteditor如何在winforms树列表视图xpo-e443中启用就地编辑:.NET,框架(XAF和XPO),eXpressApp框架
- react-router-dom
- adgoal SmartSocial-crx插件
- 教育后端:我的信息业务网站的Django后端
- CAN线协议资料.pdf
- IntelliJSettings:我的Intellij IDEA设置已导出Jar。 (编辑器首选项,键盘映射等)
