平面串联机械手逆运动学分析:杆组法与轨迹规划
需积分: 8 6 浏览量
更新于2024-08-12
收藏 328KB PDF 举报
"基于杆组分析法的平面型串联机械手运动学逆解分析 (2009年),由西华大学机械工程与自动化学院的研究人员完成,该研究利用PowerCube可重构机器人模块构建了一个可变结构的平面串联机械手,并通过杆组分析法进行了逆运动学分析,同时应用轨迹规划方法规划了机器人的步态运动。MATLAB仿真实验验证了运动学逆解的正确性,为机器人轨迹控制提供了理论基础和算法支持。"
在机器人学领域,运动学是研究机器人关节运动与末端执行器位姿之间关系的学科。平面型串联机械手是一种常见的机器人结构,由多个连杆和关节串联组成,能够在二维平面上进行运动。本文主要探讨了如何运用杆组分析法解决这类机械手的运动学逆解问题。
杆组分析法是机器人运动学的一种重要方法,它通过对机械手的各个连杆进行分解,形成一系列杆组,然后通过对杆组的几何关系分析来求解关节变量。在本文中,研究人员使用这种分析方法来解决逆运动学问题,即给定末端执行器的目标位置和姿态,反推出各关节需要的角度。逆运动学的解对于实现精确的机器人控制至关重要,因为它可以确定每个关节应如何运动以达到期望的工作空间位置。
轨迹规划是机器人操作的另一个关键环节,它涉及到如何设计机器人从初始位置到目标位置的平滑、有效路径。在本研究中,研究人员采用了特定的轨迹规划策略来规划机器人的步态,确保其在运动过程中既高效又安全。
通过MATLAB软件进行的仿真实验,研究人员验证了所提出的逆解算法的准确性和实用性。仿真结果展示了机械手在不同工作条件下的运动性能,进一步证明了杆组分析法在解决平面串联机械手逆运动学问题上的有效性。这些研究成果不仅为实际的机器人控制系统设计提供了理论依据,也为未来在机器人轨迹控制领域的深入研究提供了新的算法思路。
关键词:机器人;运动学;杆组分析法;轨迹规划
这篇论文属于自然科学类别,特别关注机器人技术中的理论和方法,对于理解机器人运动控制及设计更先进的控制算法具有重要意义。
第
28
卷第
5
期
Vo
l.
28
,
No.
5
西华大学学报(自然科学版)
Joumal
of
Xihua
University
•
Natural
Science
文章编号
:
1673-159X(
2
∞
9)
05
-0009-04
基于杆组分析法的平面型串联机械手
运动学逆解分析
王新珉,罗
康,陈志洋
(西华大学机械工程与自动化学院,四川成都
61
∞
39)
2
∞
9
年
9
月
Sep.2
1
∞
9
摘
要:利用
Powe
rC
ube
可重构机器人模块组装了一个可变异的平面型串联机械子。基于杆组分析法对该机
器人进行逆运动学分析,并采用轨迹规划方法对机器人的步态进行了规划。
MATLAB
软件的仿真结果证明了运动
学逆解的合理性,为机器人的步态轨迹控制提供了依据和算法支持。
关键词:机器人;运动学;杆组分析法;轨迹规划
中图分类号
:T
P242
文献标识码
:A
Analysis
of
Ki
nematic
In
verse Solution for a Planar Serial
Manipulator ßased
on
Accyp
Group
Analysis
W
ANG
Xin-min ,
LUO
Ka
吨,
CHEN
Zhi-Yang
(Sc
/wol
0/
Mechanical
Er
ψ
neen
略
and
Automation, Xihua University , Chengdu 610039 China)
Abstract:
By
means of
Powe
rC
ube reconfigurable robot modules, a structure-variable series
plan
缸
manipulator
is assembled.
Tb
e
inverse kinematic analysis of the manipulator is carried out based on the method of Accyp group analysis. And the trajectory planning is
also conducted.
At
last, the simulation is perfonned with software
MA
TLAB
, and the results obtained confinn the rationality of the in-
verse kinematic solution
, which provides us with a
new
algorithm in future research on the
traject
。可
control
of a robo
t.
Key
words:
robot; kinematics; Accyp group analysis;
tr
句
ec
协可
planning
串联机器人运动学逆解的目的是求出机器人各
关节角度,使其末端操作器达到需要的位姿,另外也
便于对机器人实行位姿控制。求解逆运动学方程一
般采用
D-H
法,这种方法可用于表示直角坐标型、
圆柱坐标型及球坐标型等不同构型机器人。
对于平面型串联机器人的逆解问题,可以转化为
平面连杆机构的运动分析。其中杆组分析法是一种
成熟的平面连杆机构分析法,且具有通用的商业化软
件,这样可以节省分析时间,提高逆解的准确性。
本文针对一个平面型可变异串联机械手,利用
杆组分析法对其进行了运动学逆解分析,并对轨迹
规划进行了初步的尝试。
1
PowerCube
的平面机构构型
利用三个
Powe
rC
ube
主动模块,可以组合出多种
收稿日期
:2
∞
9
-0
3-17
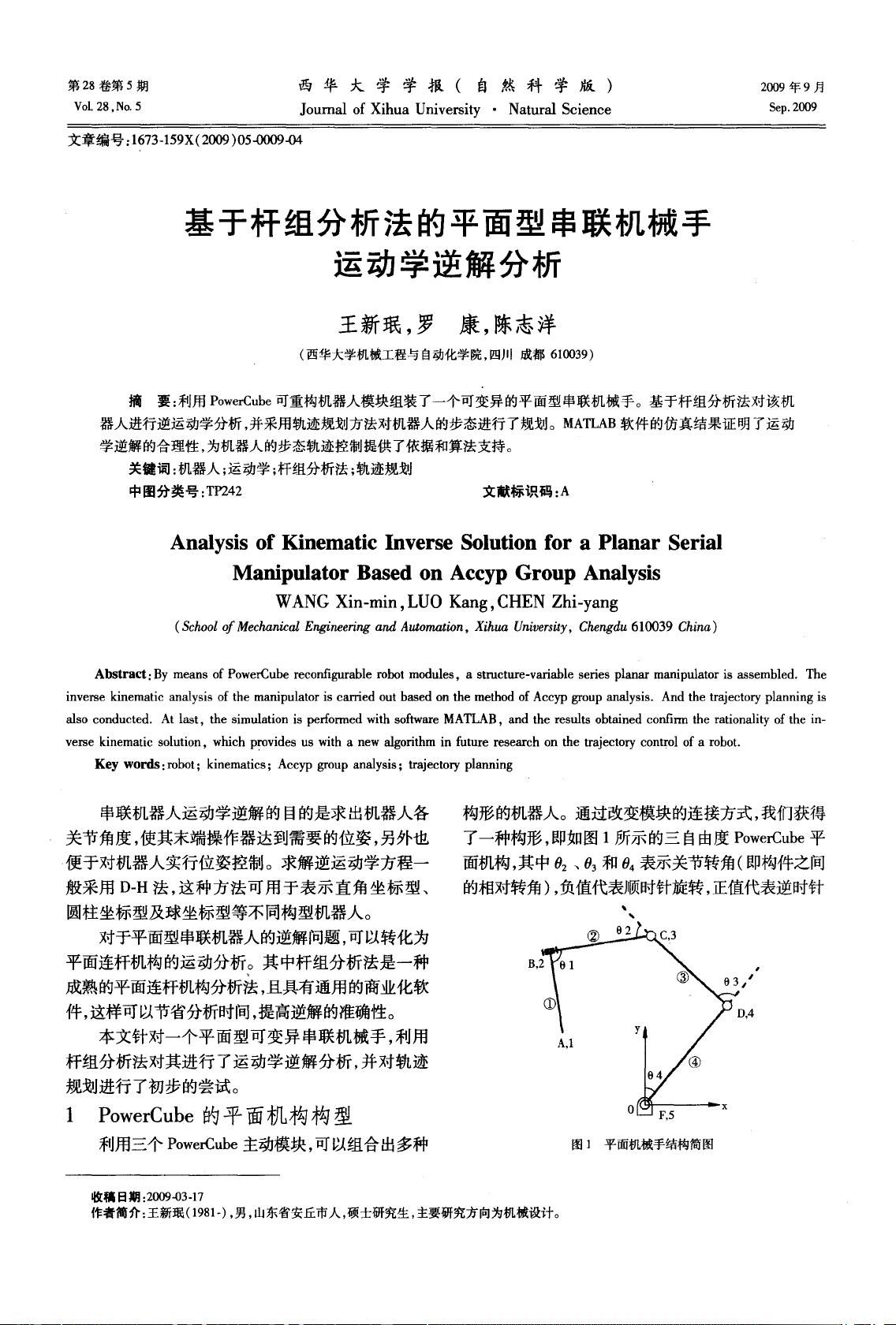
构形的机器人。通过改变模块的连接方式,我们获得
了一种构形,即如图
1
所示的三自由度
Powe
rC
ube
平
面机构,其中矶、矶和
()4
表示关节转角(即构件之间
的相对转角)
,负值代表顺时针旋转,正值代表逆时针
、
、
图
1
平面机械手结构简图
作者简介:王新珉(1
981-)
,男,山东省安丘市人,硕士研究生,主要研究方向为机械设计。
下载后可阅读完整内容,剩余4页未读,立即下载
2022-06-27 上传
314 浏览量
2021-09-25 上传
2021-06-01 上传
2020-06-02 上传
2019-01-03 上传
2020-01-09 上传
2023-03-10 上传

weixin_38699830
- 粉丝: 6
- 资源: 972
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
