基于局部熵的视觉里程计SLAM优化:挑战与改进
版权申诉
171 浏览量
更新于2024-06-27
收藏 482KB DOCX 举报
在移动机器人技术中,Simultaneous Localization and Mapping (SLAM)是一项至关重要的研究领域,它允许机器人在未知环境中自主导航和构建地图。本文的焦点是"基于局部熵的SLAM视觉里程计优化算法",这是一种针对视觉SLAM(Visual SLAM)的改进方法。视觉SLAM是利用摄像头采集的图像数据来实现机器人定位和建图,其核心组件是视觉里程计,它通过直接或间接的方法处理图像信息。
传统的非直接方法依赖于人工提取的图像特征,例如SIFT、SURF等,通过优化特征的重投影误差来估计相机的运动。这种方法在光照变化和环境复杂性方面可能存在鲁棒性问题。相比之下,直接方法试图利用所有像素信息,通过优化像素灰度来求解,但当遇到遮挡、漫反射或光照条件变化时,这种方法的有效性会受到影响。
针对这些挑战,文章提出了基于局部图像熵的细节增强优化策略。局部熵,作为一种统计量,可以衡量图像局部区域的信息不确定性,可用于增强图像细节,提高特征的稳定性和可靠性。通过引入局部熵概念,该算法可能旨在减少光照影响,增强图像纹理信息,使得在光照变化、遮挡等条件下也能更准确地估计相机运动,从而提升视觉里程计的性能和鲁棒性。
此外,SLAM系统还涉及到运动回环检测、精确地图创建以及全局优化等步骤,这些过程确保了整个系统的准确性。然而,复杂环境和动态目标运动对SLAM系统的稳定性提出了更高的要求,长时间和远距离的实时应用需要系统具有极高的抗干扰能力。
本文的研究不仅关注视觉里程计的优化,也强调了SLAM在人工智能领域的广泛应用,如自动驾驶、无人机、虚拟现实和增强现实等,特别是在深度学习技术融入SLAM后,其研究热度进一步提升。通过对局部熵的利用,作者希望能够为解决视觉SLAM中的关键问题提供一种创新解决方案,以推动该领域的技术进步。
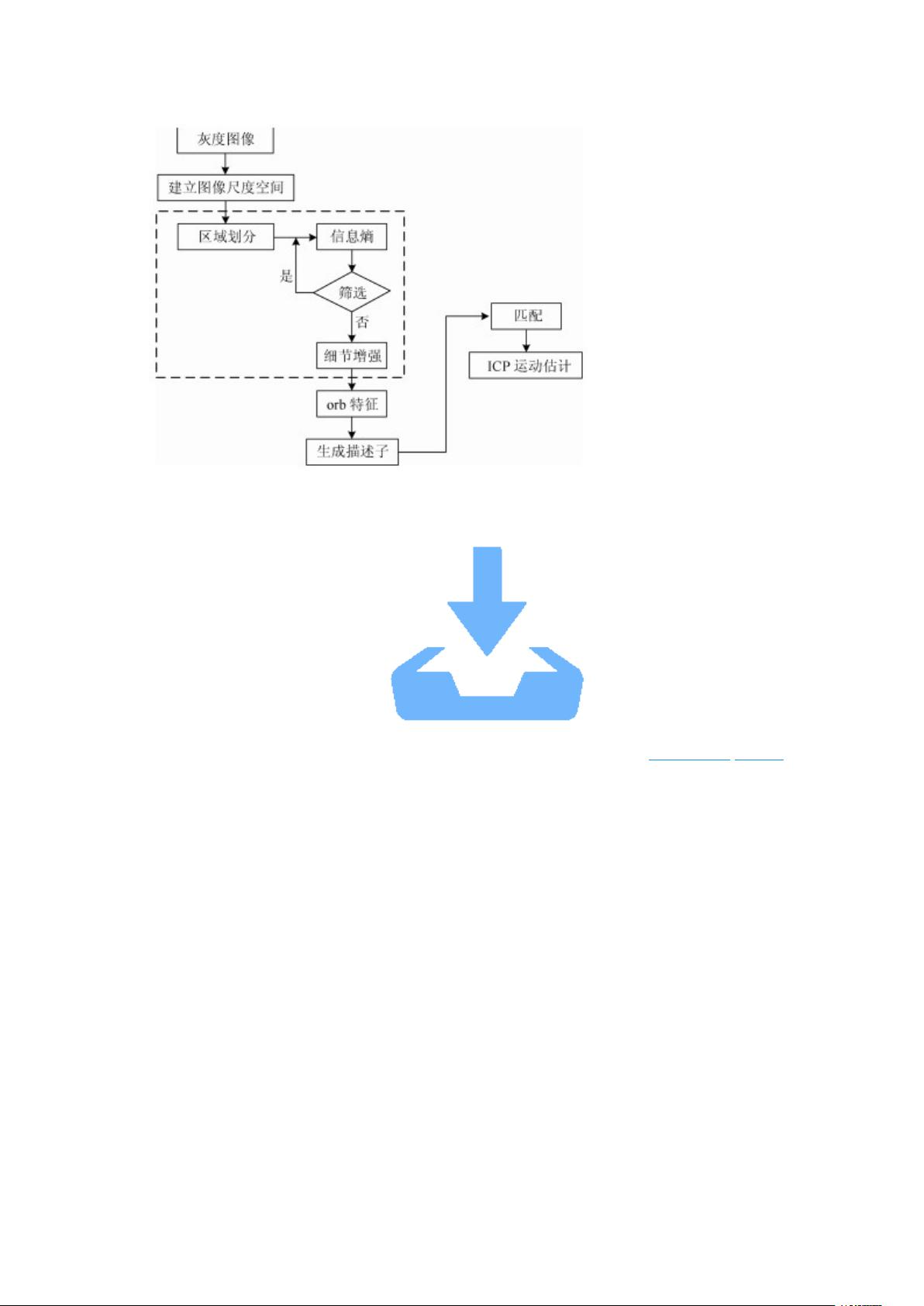
图 3 视觉里程计优化算法
Fig. 3 Optimization visual odometry algorithm
下载: 全尺寸图片 幻灯片
首先, 构建图像金字塔, 增加特征的尺度不变特性.由于每层图像都根据尺度因子进行
了缩放处理, 为了使图像特征实现均匀化提取, 并且降低后续图像匹配时的复杂度, 在不同
的尺度空间下, 根据图像块的尺寸定义(width, height)对图像进行区域分割.
逐层对每个图像块进行角点特征的快速提取, 通过四叉树方式对关键点进行分配和管
理, 根据预先设定的阈值选取影响度大的特征(最强壮的特征)作为该结点的特征进行保留,
以此实现图像特征的均匀分布. 同时, 增加特征的旋转不变特性, 计算特征点在图像中的实
际位置, 并生成特征描述子进行保存.
在原有算法中, 为了使特征在整幅图像中均匀分布, 算法对每个图像块均做提取角点
的操作. 这样做的结果是, 既增加了无纹理或像素梯度不明显区域的计算量, 又可能造成某
些区域保留下来的角点与相邻帧图像该区域角点并不能建立有效的匹配关系, 反而其他区
域中表征纹理或结构信息的角点被删除掉以满足预先设定的特征参数阈值.
剩余20页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-08-25 上传
2022-12-15 上传
2022-11-03 上传
2022-11-03 上传
2020-06-04 上传
2022-11-03 上传

罗伯特之技术屋
- 粉丝: 4444
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
