Matlab仿真实现:一阶倒立摆控制系统设计与分析
需积分: 3 8 浏览量
更新于2024-08-26
收藏 2.45MB PDF 举报
本文档详细介绍了如何利用MATLAB软件进行一阶倒立摆的数学模型建立和SIMULINK多体动力学平台上的控制系统仿真。首先,我们关注的是一个由小车和倒立摆构成的控制系统,系统参数包括小车质量M=0.5kg,摆杆质量m=0.2kg,摆杆长度2l=0.6m,以及小车的摩擦系数b=0.1N/(m/s)。此外,系统的转动惯量I=ml^2/3=0.006 kg*m^2,这对于后续的动态分析至关重要。
在系统建模部分,作者分别考虑了小车和摆杆的动力学方程。小车受到重力、摩擦力和施加的力F的作用,其运动方程可以表示为牛顿第二定律,而摆杆的运动则涉及到关节力矩N和P,它们与摆杆的角度θ和角速度有关。通过代数运算,得到了x(小车位置)和θ(摆杆角度)关于力F的表达式,并通过三角恒等变换简化了方程组。
为了进一步分析,作者将摆杆角度θ表示为φ+π,这样当φ在0附近变化时,简化了数学处理。通过拉普拉斯变换,原始的微分方程组被转换成便于分析的频域表达式,从而形成了系统的简化框图。框图中包含了输入F、系统函数G(s)、状态变量X(s)等重要元素。
最终,文档展示了系统的阶跃响应,其中蓝色线代表位置响应,黄色线可能代表角度响应,这是评估控制器性能的重要指标。通过这种仿真方法,研究者可以观察到不同控制策略下倒立摆的动态行为,优化控制器的设计,以实现对小车位置和摆杆角度的精确控制。
总结来说,本论文的核心内容是运用MATLAB的SIMULINK工具箱来模拟和分析一阶倒立摆的动态特性,涉及了从物理模型建立、数学建模到系统仿真的一系列步骤,这对于理解倒立摆的运动规律以及设计有效的控制策略具有重要意义。
控制系统:小车和倒立摆
系统参数:
小车质量:M=0.5kg
摆杆质量:m=0.2kg
摆杆长度:2l=0.6m
小车摩擦系数:b=0.1N/(m/s)
转动惯量:I=ml^2/3=0.2*0.3^2/3=0.006 kg*m^2
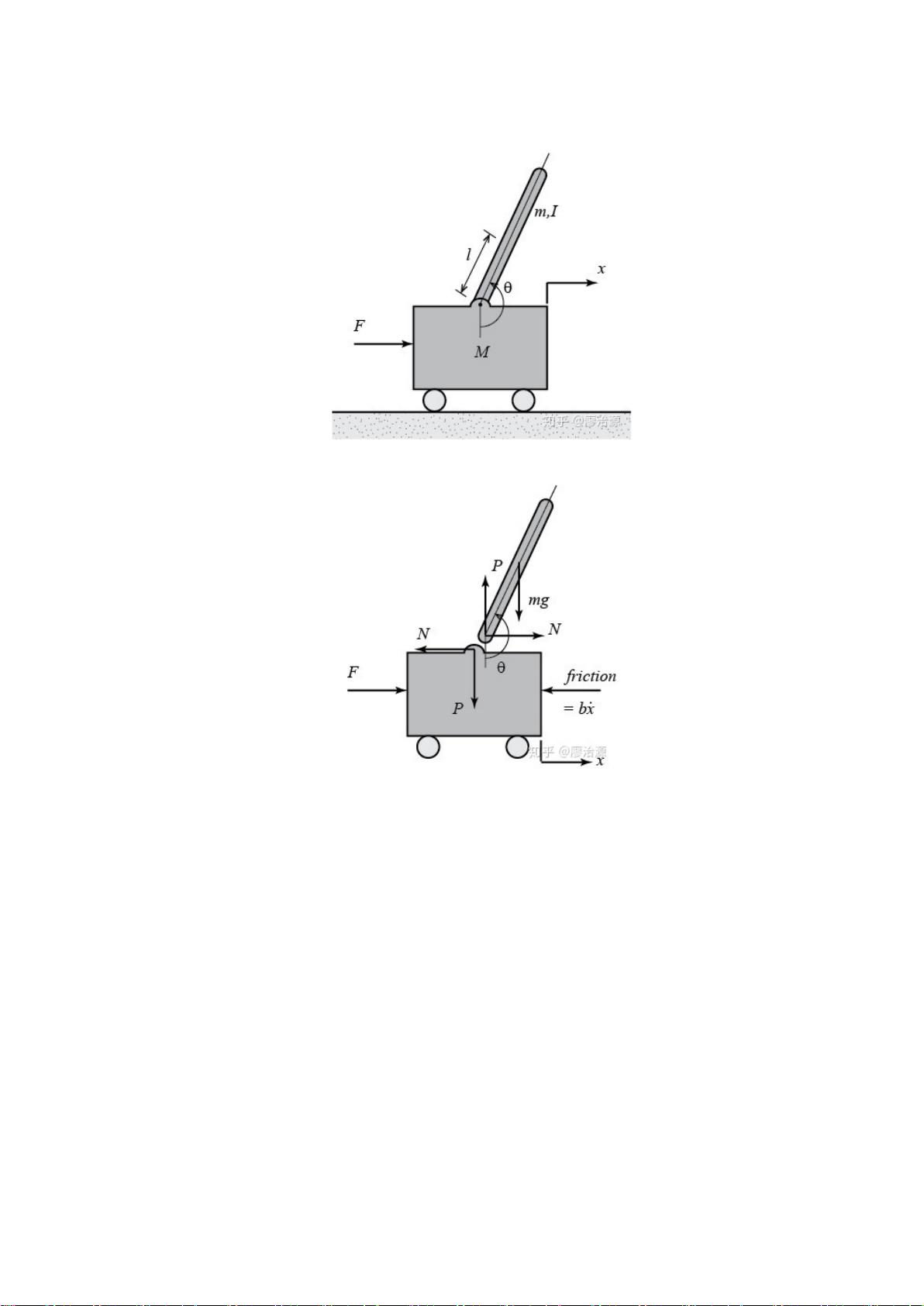
系统建模
对小车:
xMNxb
F
对摆:
下载后可阅读完整内容,剩余8页未读,立即下载
1764 浏览量
137 浏览量
610 浏览量
440 浏览量
146 浏览量
195 浏览量
126 浏览量
2023-05-09 上传
178 浏览量

ziqian__
- 粉丝: 30
 我的内容管理
展开
我的内容管理
展开







最新资源
- GPRS通信的AT指令详解
- 探索Microsoft Direct3D开发:创建3D游戏与C#应用
- 开源工具指南:AT91SAM7S跨平台开发第二版
- Java编程初学者必备:实战习题与知识点解析
- Tomcat基础配置教程:虚拟目录与端口设置
- 开源与供应商产品:2007年SOA SCA/SDO实现趋势
- Keil C51单片机开发工具全面指南
- Struts+Spring+Hibernate集成教程:架构与实战
- 《COM与.NET互操作性指南》:技术深度解析与实战
- ObjectARX2006实战指南:从入门到精通
- 数据结构与算法分析——清华大学出版社严蔚民
- DVB-S2白皮书:新一代卫星广播与交互服务技术概览
- Thinking in Java 3rd Edition Beta:编程深度探索
- 学生信息管理系统:基于VB6.0与Access2000的开发与实践
- C#编程基础与实战指南
- 面向对象方法:企业人事信息系统需求分析与工具选择
