车载视觉行人保护:Adaboost+Kalman跟踪提升主动安全性
101 浏览量
更新于2024-08-28
1
收藏 542KB PDF 举报
在现代城市交通环境中,行人保护是提升车辆主动安全性的关键要素。本文介绍了一种基于车载视觉传感器的行人检测与跟踪方法,旨在确保行人在道路交通中的安全。该方法的核心技术主要包括Adaboost算法和Kalman滤波。
Adaboost算法在这里扮演了至关重要的角色,它是一种集成学习算法,通过训练样本类Haar特征来构建一个级联分类器。Haar特征是一种简单而有效的特征选择,特别适合行人检测任务,因为它们能够捕捉到行人轮廓的显著边缘和形状信息。级联分类器通过逐层筛选,可以快速识别出图像中的行人目标,从而减少计算复杂度,降低检测时间。
接下来,系统采用Kalman滤波原理对检测到的行人目标进行跟踪。Kalman滤波是一种优化的状态估计算法,它能够在噪声环境下有效地预测和更新行人位置,从而建立动态感兴趣区域。这种方法不仅能精确地跟踪行人,还能根据历史数据分析其运动轨迹,预测潜在的风险行为。
试验结果显示,该行人保护方法在单次检测阶段平均耗时约为80毫秒/帧,达到了88%的检测率,证明了其高效性和准确性。当与Kalman滤波结合后,跟踪过程的实时性得到显著提升,平均耗时降低至55毫秒/帧,这对于实时交通场景中的应用非常有利。
背景上,随着全球汽车保有量的增长,交通事故频发,行人安全问题尤为突出。据统计,行人伤亡在交通事故中占据了相当大的比例,尤其是在我国这样的混合交通模式下,行人保护显得尤为重要。因此,研究人员不断探索先进的行人保护技术,不仅强化汽车被动安全系统,还推动主动安全系统的研发和应用。
总结来说,基于车载视觉的行人检测与跟踪方法通过集成高效的Adaboost算法和精密的Kalman滤波,为提高城市交通中行人安全提供了有力的技术支持,对于改善交通安全状况具有重要意义。未来,随着人工智能和计算机视觉技术的进一步发展,这类方法有望在汽车主动安全领域发挥更大的作用。
基于车载视觉的行人检测与跟踪方法基于车载视觉的行人检测与跟踪方法
摘要: 为提高城市交通环境下车辆主动安全性,保障行人安全,提出了基于车载视觉传感器的行人保护方法。利
用Adaboost 算法实现行人的快速检测,结合Kalman 滤波原理跟踪行人,以获取其运行轨迹。 该方法利用离散
Adaboost 算法训练样本类Haar 特征,得到识别行人的级联分类器,遍历车载视觉采集的图像,以获取行人目
标;结合Kalman 滤波原理,对检测到的行人目标进行跟踪,建立检测行人的动态感兴趣区域,利用跟踪结果分
析行人的运行轨迹。 试验表明: 该方法平均耗时约80 ms /帧,检测率达到88%; 结合Kalman 滤波原理跟踪后,
平均耗时降到55 ms /帧,实时性较好。 随
摘要: 为提高城市交通环境下车辆主动安全性,保障行人安全,提出了基于车载视觉传感器的行人保护方法。利用
Adaboost 算法实现行人的快速检测,结合Kalman 滤波原理跟踪行人,以获取其运行轨迹。 该方法利用离散Adaboost 算法训
练样本类Haar 特征,得到识别行人的级联分类器,遍历车载视觉采集的图像,以获取行人目标;结合Kalman 滤波原理,对检
测到的行人目标进行跟踪,建立检测行人的动态感兴趣区域,利用跟踪结果分析行人的运行轨迹。 试验表明: 该方法平均耗时
约80 ms /帧,检测率达到88%; 结合Kalman 滤波原理跟踪后,平均耗时降到55 ms /帧,实时性较好。
随着汽车保有量的不断增加,道路交通事故和因车祸伤亡的人数居高不下。 为满足人们对汽车安全性能要求的日益提高,
越来越多的先进技术被应用到汽车主动安全领域。在道路交通事故中,主要的受害群体是参与交通系统中的行人和骑自行车的
人等。据美国高速公路安全管理局( NHTSA) 的资料显示,2008 年美国由于交通事故导致69 000 个行人死亡或者受伤、4
378 个行人死亡,行人死亡人数占全年交通事故死亡总人数的11. 7%。2007 年我国因交通事故导致行人死亡的人数为21 106
人,占交通事故死亡总人数的25. 9%,行人受伤人数为70 838 人,占交通事故受伤总人数的18. 6%. 与一些发达国家相比,由于
我国的交通模式主要是混合交通模式,导致交通事故死亡原因和伤害模式与发达国家不同。
近年来,为保障行人安全、提高汽车主动安全性能,国内外一些科研院所对行人保护技术进行了研究探讨,在不断完善汽
车被动安全系统的同时,逐渐发展和应用主动安全系统,结合行人保护概念和技术的引入,完善对行人的保护。 如Bajracharya
等建立了双目视觉行人保护集成系统,实现道路交通场景下40 m 距离范围内行人的检测与跟踪。
Munder 等融合行人的点分布形状模型和纹理特征建立了行人识别分类器,采用基于粒子滤波的贝叶斯方法实现行人的跟
踪。德国Enzweiler 等分别针对统计学习中的小波特征、线性支持向量机以及神经网络的方法进行比较分析,通过设计不同尺度
的分类器来检测图像中的行人。清华大学的江帆等提出一种基于模型融合的行人跟踪算法,结合离线学习和在线互学习对模型
进行更新。中国科学技术大学程有龙等将行人检测的先验知识融入到跟踪模型自学习过程中,对被跟踪行人进行动态建模,从
而实现在真实监控场合下跟踪具有复杂运动的行人。多传感器信息融合以及行人模型的建立要求较大的计算量和计算参数,很
难满足类似车辆主动安全预警等系统实时性要求。 本文采用车载单目视觉传感器,利用训练得到的行人识别级联分类器实时获
取车辆前方的行人,并对其进行跟踪以记录其运动轨迹,从而为驾驶员和行人的有效预警提供技术参考。
1 基于基于Adaboost 算法的行人检测算法的行人检测
1. 1 Adaboost 算法原理算法原理
Adaboost 算法通过训练得到由分类能力一般的弱分类器叠加而成的强分类器,再将若干个强分类器串连成一个级联分类器
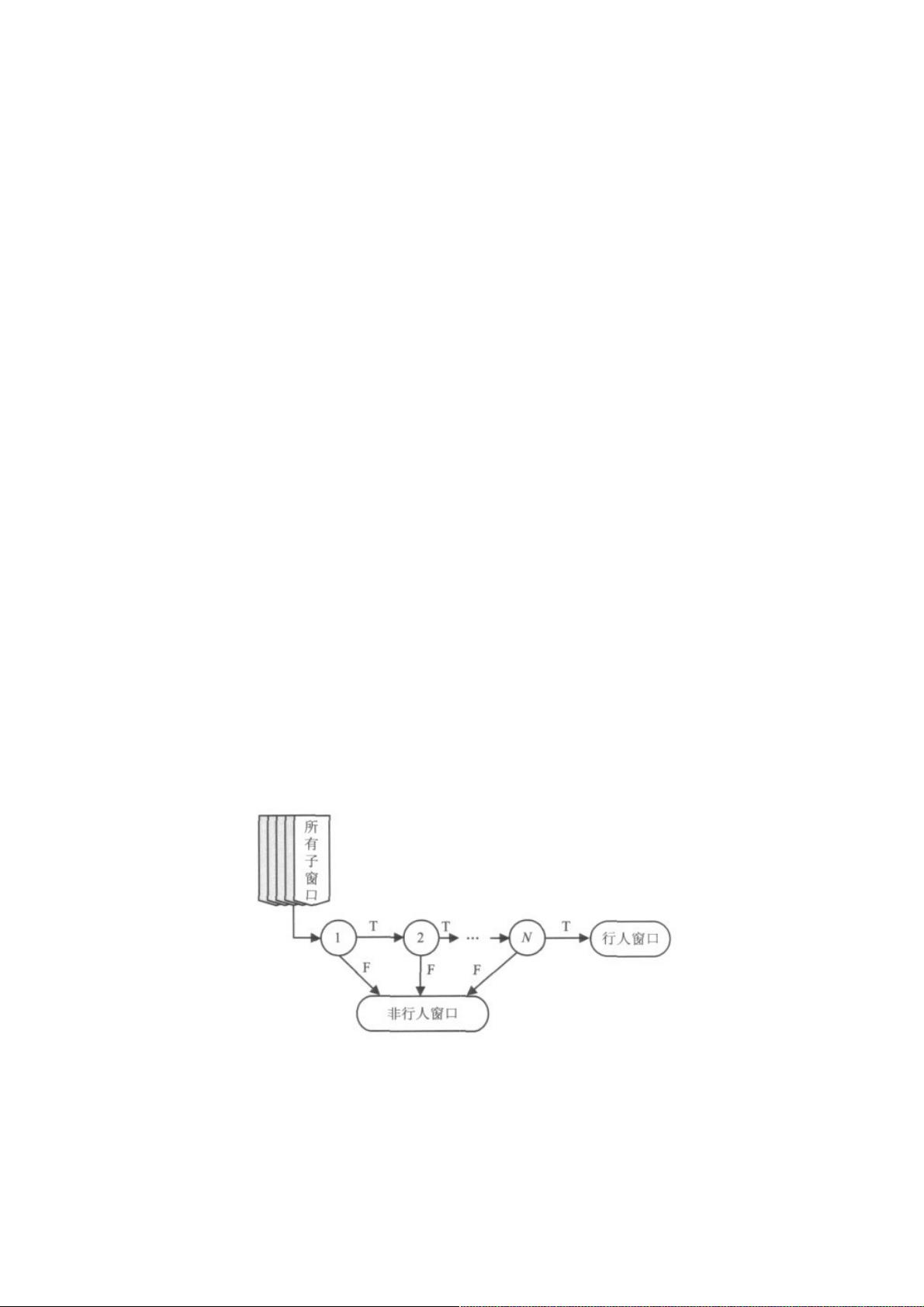
来遍历图像。为快速实现行人的检测和防撞预警,鉴于Adaboost 算法的特点,本文选择离散Adaboost 算法训练得到识别行人
的级联分类器,以快速排除图像中大部分非行人窗口,其结构如图1 所示。 其中,各阶段的强分类器训练过程如图2 所示。
图1 N 阶级联分类器结构示意
下载后可阅读完整内容,剩余6页未读,立即下载
2021-10-03 上传
2023-07-24 上传
2023-05-01 上传
2024-11-02 上传
2023-05-28 上传
2023-03-28 上传
2024-07-03 上传

weixin_38674115
- 粉丝: 6
- 资源: 968
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
