概率反向最近邻查询:不确定数据的高效处理
151 浏览量
更新于2024-07-15
收藏 682KB PDF 举报
"这篇研究论文探讨了在处理不确定数据时概率反向最近邻查询的高效方法。面对现实世界中由于测量设备限制、环境干扰或应用特性(如移动对象监测)导致的数据不确定性,传统的精确数据库查询方法无法直接应用于不确定场景。论文提出了概率反向最近邻(PRNN)查询的概念,这是一种在用户指定阈值以上的概率下获取可能是反向最近邻的数据对象的方法。"
在实际应用中,反向最近邻(RNN)查询是一个至关重要的问题。它在数据库中寻找所有将查询对象作为其最近邻的数据对象。然而,当数据存在不确定性,如不精确测量或环境因素导致的数据模糊时,以往用于精确数据库的RNN查询解决方案就显得不足。这篇论文首次将RNN查询的概念扩展到不确定数据库领域,提出了概率反向最近邻(PRNN)查询。
PRNN查询的目标是找到那些具有高于或等于用户设定概率阈值成为查询对象反向最近邻的数据对象。这一概念的提出旨在解决不确定性带来的挑战,确保查询结果不仅考虑距离,还考虑了数据的可靠性或可能性。
论文可能涵盖了以下几个方面:
1. **不确定性的建模**:讨论如何表示和处理不确定数据,可能包括概率分布模型、区间或云模型等。
2. **查询处理算法**:设计适应不确定数据的PRNN查询算法,可能涉及概率计算、随机模拟或其他优化技术。
3. **性能评估**:通过实验验证算法的效率和准确性,比较不同策略下的查询性能。
4. **阈值影响分析**:探究用户设定的不同概率阈值对查询结果的影响。
5. **应用案例**:可能包含实际应用示例,展示PRNN查询在现实世界问题中的应用价值,如目标跟踪、地理信息系统或社交网络分析。
此研究论文对于理解和开发处理不确定数据的高效查询方法具有重要意义,为大数据分析和决策支持提供了新的工具和思路。通过深入理解PRNN查询,我们可以更好地应对现实世界中由于数据不确定性带来的挑战,提高数据挖掘和分析的准确性和可靠性。
4
Symbols Descriptions
D (A, or B) the uncertain database(s)
d the dimensionality of the data set
UR( o) the uncertainty region of object o
¯(o) the hypersphere that tightly bounds UR(o)
α the user-specified probability threshold
dist(·, ·) the Euclidean distance between two objects
Table 1 Notations and Descriptions
(NN) of each data object, and then check whether or
not this object is closer to query point than to its NN.
However this requires a sequential scan over the entire
data set and incurs high computation cost (I/O cost
as well). In order to reduce such cost, many pruning
techniques [18,36,41,33,38] have been proposed, which
assume that data objects are precise points.
Similarly, for our PRNN problem, it is also ineffi-
cient to apply the sequential scan method. Moreover,
the inherent uncertainty of data objects makes the ex-
isting RNN techniques inapplicable to the PRNN re-
trieval. For example, the pruning region defined in the
state-of-the-art TPL method [38] is invalid in the PRNN
case, since the positions of objects are uncertain. Fur-
thermore, in order to refine PRNN candidates, the cal-
culation of the complex Inequality (1) requires access-
ing all the objects in the database, which is very costly.
Therefore, in the sequel, we first design an effective
pruning method that is specific for our PRNN query
processing, and then reduce the number of objects that
are involved in the procedure of refining candidates. Ta-
ble 1 summarizes the commonly-used symbols in this
paper.
4 Probabilistic RNN Search
As mentioned above, it is not efficient to answer PRNN
queries via sequential scan, in terms of both compu-
tation and I/O costs. Thus, we use a multidimensional
index I (e.g. R-tree [12], M-tree [10], or SR-tree [14]) to
facilitate PRNN query processing over uncertain database
D. Since our proposed method is independent of the
underlying index, in this paper, we use one of popular
indexes, R-tree, to index uncertain objects (i.e. their
uncertainty regions), which has been extensively used
in the literature of RNN on precise data in Euclidean
space [18,33,36,38,39] or uncertain query processing
[20,21,23,24,28]. The framework for our PRNN search
is as follows. Given any query object q, we first tra-
verse the R-tree I with an effective pruning method to
reduce the PRNN search space, obtaining a candidate
set, and then refine the candidates by checking their ac-
tual probabilities P
P RN N
(q, o) in Inequality (1). Those
objects with probabilities greater than or equal to α are
returned as the query result.
4.1 Heuristics of GP Method
In this subsection, we show the heuristics of our pruning
method, namely geometric pruning (GP), that permits
the development of efficient PRNN search procedures.
Recall that, a PRNN query retrieves all the data ob-
jects that have query object q as their NNs with prob-
abilities greater than or equal to α ∈ (0, 1]. Thus, our
basic pruning idea is to discard those objects that have
probabilities never greater than β, for some β ∈ [0, α).
For brevity, we denote such a pruning method as GP
β
,
which, based on the PRNN definition, would not intro-
duce any false dismissals (actual answers to the query
that are however not in the retrieval result).
Note that, a special case of GP
β
, GP
0
when β = 0,
will filter out data objects that are definitely not RNNs
(i.e. with zero probability to be RNNs) of a query point
q. In fact, this case corresponds to applications where
we do not know the distributions of data objects within
their uncertainty regions. In order to guarantee no-
false-dismissal property of the query result, our GP
0
method has to conservatively prune data objects based
on the geometric property (e.g. shape) of their uncer-
tainty regions, assuming objects can locate anywhere in
regions and with any distributions. On the other hand,
in applications where object distributions are known in
advance, our GP
β
method (β ∈ [0, α)) can wisely uti-
lize this additional information to enhance the pruning
ability. Since GP
β
(β > 0) essentially applies techniques
similar to GP
0
, in the sequel, we will start with GP
0
,
and later generalize GP
0
to GP
β
(β ∈ [0, α)) in Section
4.5.
(a)
(b)
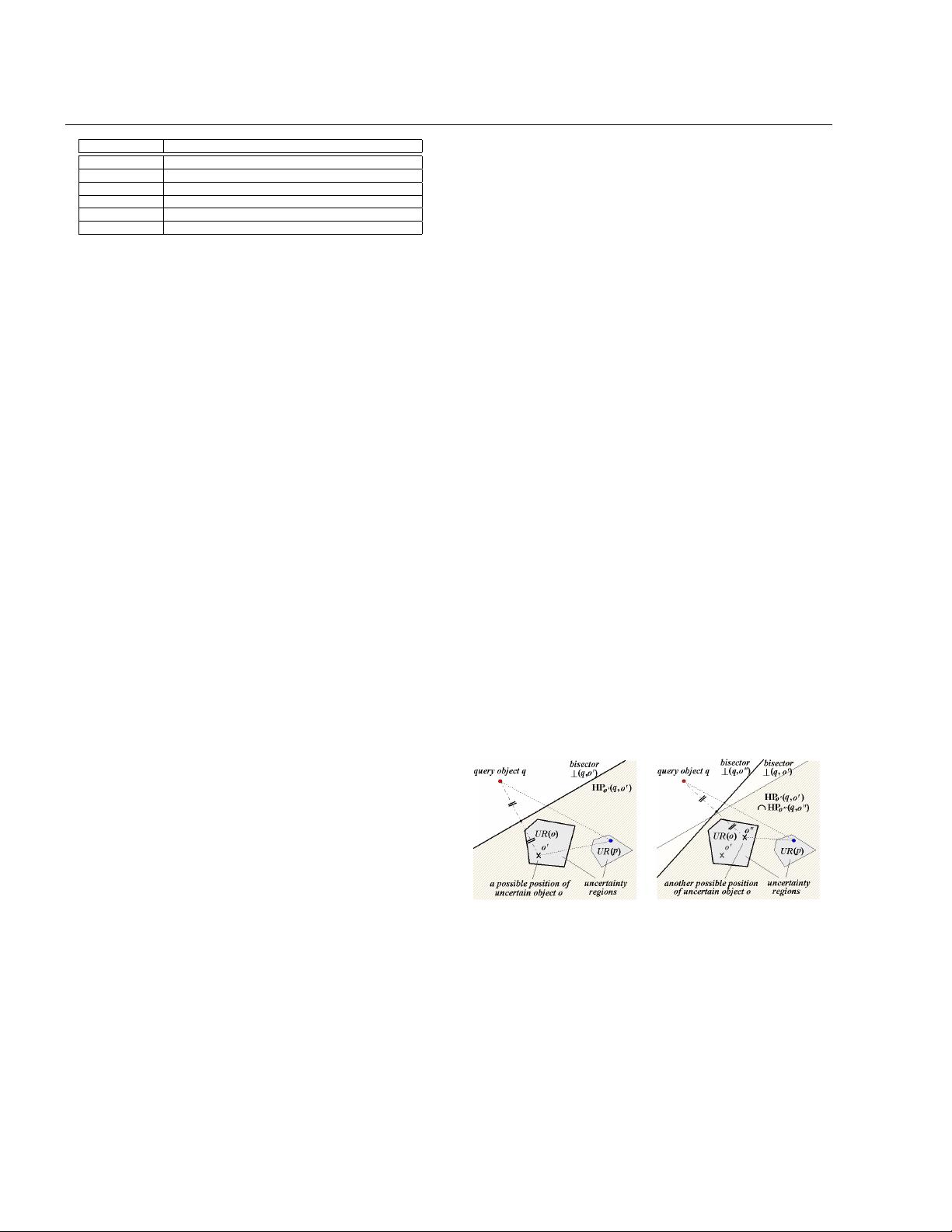
Fig. 2 2D Example of GP
0
Heuristics
Consider a query point q and any uncertain object o
in a 2D space as shown in Fig. 2(a), where o can locate
anywhere in its uncertainty region UR(o) with any dis-
tribution. Let o
0
be one possible position of uncertain
object o. The perpendicular bisector ⊥ (q, o
0
) between
points q and o
0
would partition the entire data space
into two halfplanes, HP
o
0
(q, o
0
) that contains point o
0
and HP
q
(q, o
0
) that contains point q. For any data ob-
ject p that completely falls into HP
o
0
(q, o
0
) (i.e. the
shaded area), we have dist(o
0
, p) < dist(q, p) (i.e. q is
not NN of p). Therefore, p cannot be the RNN of q [38].
剩余19页未读,继续阅读
2019-07-22 上传
2021-03-03 上传
2021-03-26 上传
2024-11-05 上传
2024-11-05 上传
2023-07-12 上传
2023-04-01 上传
2024-06-30 上传
2023-09-16 上传

weixin_38538585
- 粉丝: 3
- 资源: 956
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
