视觉SLAM中的两帧相机姿态估计与PnP算法解析
需积分: 0 112 浏览量
更新于2024-07-15
收藏 4.06MB PPTX 举报
"该资源是一份关于基于两帧图像的相机姿态估计的讲义,主要讲解了多视图几何在计算机视觉和SLAM(Simultaneous Localization And Mapping)中的应用。内容涵盖了对极几何、八点法、P3P(Perspective-n-Point)以及ICP(Iterative Closest Point)等核心概念和技术。这份资料适用于学习视觉SLAM前端特征点法的读者,特别是对相机运动估计感兴趣的学者和开发者。"
文章详细内容:
相机姿态估计是计算机视觉和SLAM中的关键任务,用于确定相机在连续两帧图像间的相对位置和方向。讲义首先引入了视觉SLAM的基本框架,将SLAM系统分为前端和后端。前端,即视觉里程计,负责从连续图像中估计相机的粗略运动。
对极几何是两帧间相机姿态估计的基础,它利用匹配的特征点来恢复相机运动。当已知两帧图像上的一对匹配特征点时,可以通过对极约束公式推导出相机的旋转矩阵R和平移向量t。八点法是一种常用的方法,通过构建线性方程组并进行奇异值分解来求解本质矩阵E,从而得到相机的运动参数。这种方法可以处理一定数量的匹配点,但在噪声较大的情况下可能不够稳定。
PnP问题,即 Perspective-n-Point,是在知道3D点及其在图像中的投影时求解相机位姿的问题。讲义中提到了直接线性变换(DLT)、P3P算法和ICP。DLT可以直接从3D-2D对应计算相机姿态,但对数据质量要求较高。P3P算法利用三个匹配点,通过三角形相似关系转换问题,使其更易于求解。然而,P3P对数据的鲁棒性较差,当匹配点不足或有误匹配时,可能会失败。ICP算法则通过迭代寻找最佳匹配,适用于3D-3D对应情况,常用于机器人定位和视觉伺服等领域。
这份讲义详细地介绍了相机姿态估计的各种方法,包括理论推导和算法实现,是学习视觉SLAM前端特征点法的重要参考资料。通过深入理解和实践这些方法,读者可以掌握如何从图像序列中有效地估计相机运动,为构建自主导航和环境感知系统奠定基础。
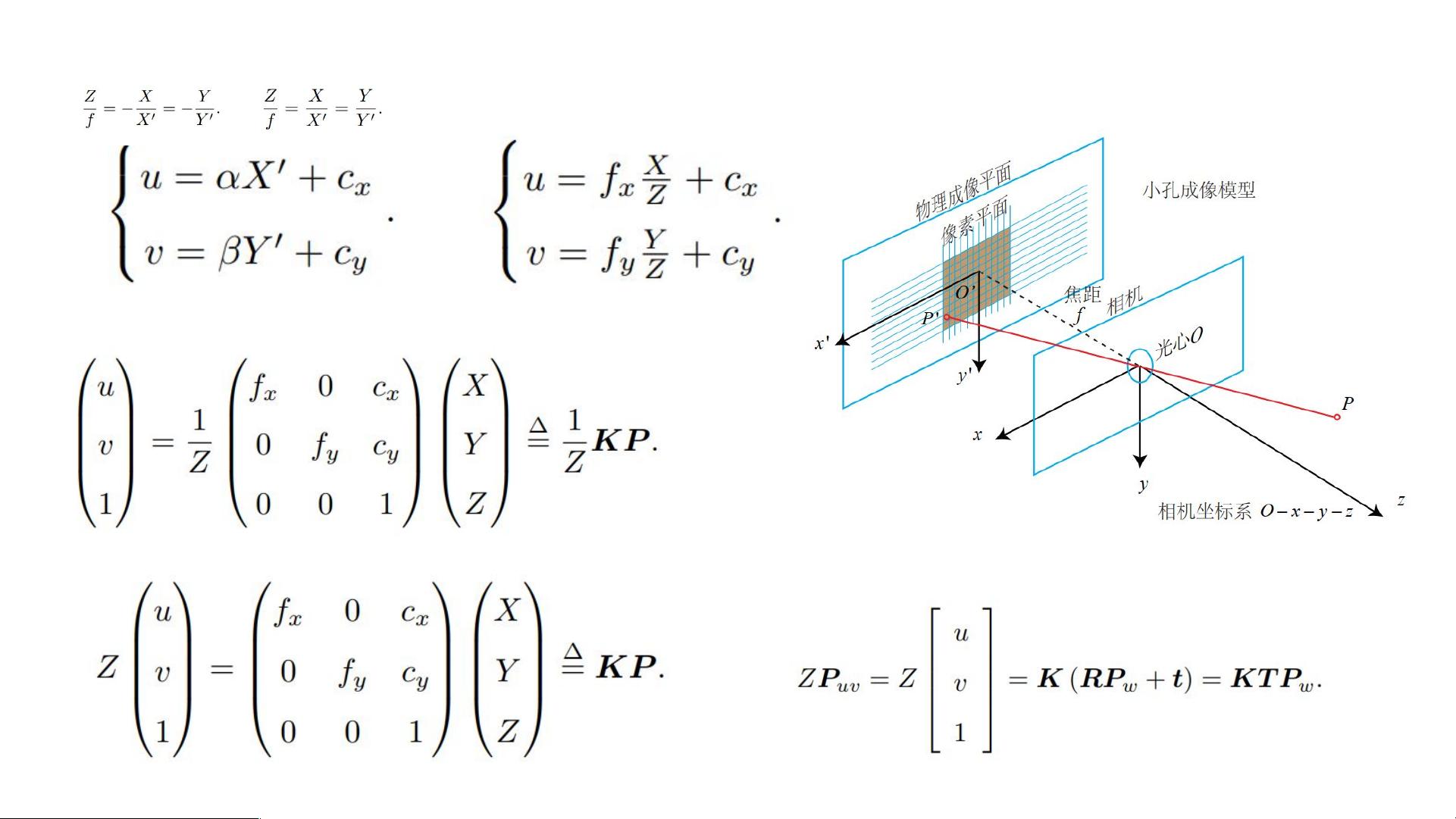
像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移
剩余19页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-06-02 上传
2022-11-23 上传
2022-11-23 上传
146 浏览量
472 浏览量
2021-11-28 上传

w4c4dwsz
- 粉丝: 6
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- jdk-7u80-windows-x64.exe
- CRM成功的十大秘诀DOC
- InsectDefense
- ProClub:2015-2016年霍姆斯特德高中编程俱乐部工作坊资料
- cryptmount:Linux加密文件系统管理工具-开源
- Zadania-Informatyka
- cards_test_task
- 三菱PLC通过三菱控件与PC交互
- 留住客户还不够
- tv-remote-control:在浏览器上运行的电视遥控模拟器
- python-utils:在Keboola Connection环境中运行的Python应用程序的实用程序库
- 数据库世界:CS340网站数据库
- cpu环境下可运行的骨骼序列行为识别的代码
- IFCX-开源
- st-tutorial.github.io
- DeliveryTracker:大韩民国的快递服务跟踪器写在Rust中
