PCS7 V7.1 APL库PIDConL控制功能块详解
版权申诉
38 浏览量
更新于2024-07-11
收藏 1.83MB PDF 举报
"3--PCS7V7.1SP1中APL库控制功能块PIDConL使用入门-16页.pdf"
本文档主要介绍了在PCS7 V7.1 SP1版本中,如何使用APL(Automation Protocol Library)库中的控制功能块PIDConL进行PID控制。PIDConL是用于实现比例积分微分(PID)控制逻辑的功能块,常用于自动化系统中对过程变量的精确控制。
1. PIDConL介绍:
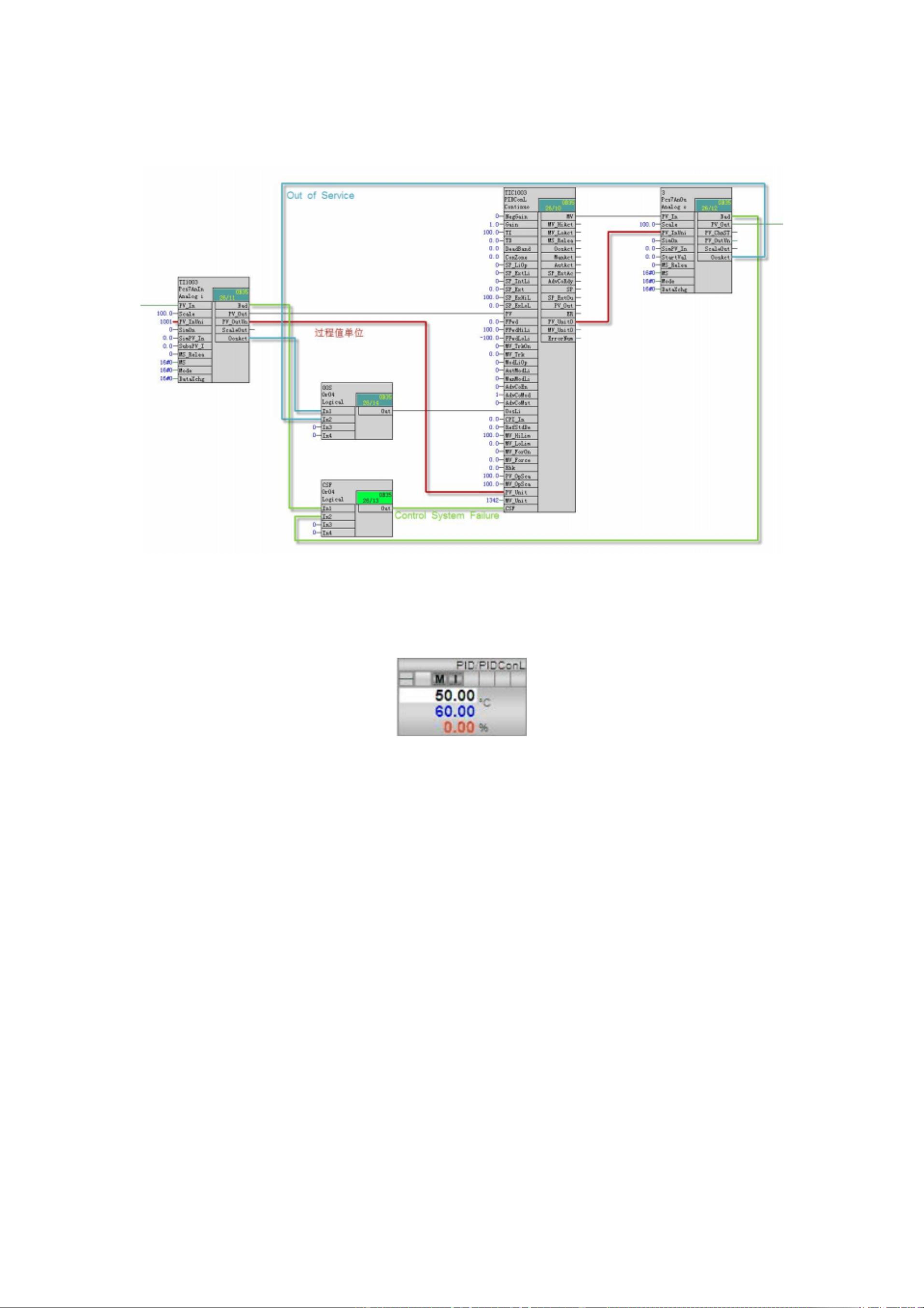
PIDConL是PCS7 CFC (Continuous Function Chart)中的一个功能块,用于实现PID控制器。该功能块可以处理模拟输入(PV)和输出(MV),并且提供了外部设定点(SP)输入,以适应不同操作模式的需求。
2. 结构与参数:
- PV_In:过程变量输入,表示被控对象的实际值。
- PV_Out:过程变量输出,通常是反馈信号。
- MV:控制输出,用于驱动执行机构,如阀门或电机。
- SP:设定点,可以是内部设定点或外部设定点,根据操作模式切换。
- E, R: 错误和复位信号,用于控制块的状态管理。
- AutModLi, ManModLi: 自动和手动模式标志,用于切换控制模式。
- ModLiOp, SP_LiOp: 模式选择和设定点跟踪操作结构,用于确定当前操作模式。
3. 操作模式:
- 自动模式(AutModLi=1):PIDConL根据设定点和过程变量自动调整控制输出。
- 手动模式(ManModLi=1):用户可以直接设置控制输出,忽略PID计算。
4. 设定点源:
- SP_Ext:外部设定点,可以通过其他设备或系统提供。
- SP_Int:内部设定点,可由CFC或其他逻辑设定。
- SP_TrkExt:设定点跟踪外部,当SP_LiOp=1且SP_ExtLi=1时,设定点将跟随外部设定点变化。
5. 高级控制特性:
- AdvConEn:高级控制启用,允许配置更复杂的控制策略。
- AdvCoMV, AdvCoModSP:与高级控制相关的输出和模式设定点,可能涉及OPC服务器通信,用于更灵活的控制逻辑。
6. CFC和SFC集成:
PIDConL功能块可方便地集成到CFC连续功能图和SFC顺序功能图中,实现过程控制逻辑的编程和流程控制。
7. 应用场景:
PIDConL适用于各种工业环境,如批处理、连续过程控制,通过调节MV来保持PV接近SP,以达到工艺要求。
总结来说,PIDConL是PCS7系统中一个强大的PID控制器功能块,具备灵活的操作模式选择、设定点管理和高级控制功能,能够帮助工程师在PCS7环境中实现高效的过程控制。了解并熟练掌握PIDConL的使用,对于提升自动化系统的控制性能至关重要。
3 PID
CFC CFC OS
PIDConL
4 PIDConL
2 2
2 2 1
PIDConL ICON
剩余15页未读,继续阅读
点击了解资源详情
113 浏览量
114 浏览量
513 浏览量
768 浏览量
208 浏览量
151 浏览量
768 浏览量
146 浏览量

sqskdjj
- 粉丝: 0
- 资源: 4万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- ImageAnnotation:有关如何使用Photoshop提取视频帧和注释图像的教程。 提供了两个脚本来计算每个类别的覆盖率和图像大小(R和Matlab)
- mixchar:R包“ mixchar”的存储库
- MFCApplication1.rar
- 在安卓上使用的app例程
- test01:这只是一个git测试库。 测试Git及其功能
- MFC自定义按钮实现
- part_2a_decoding_with_loops.zip
- 行业文档-设计装置-一种具有储水功能的花盆.zip
- EVERSON
- 个人偏好:这些是我使用的所有东西,可能会忘记的事情。 所以我把它们都收集在这里。 这可能对您有用:)
- 验证码训练、识别数据集,共1070个验证码图片
- 华科网络内容管理系统 v5.3 手机+PC
- SSM整合jar包
- matlab确定眼睛的代码-BME3053C-final-project:实验大鼠鬼脸秤的机器识别
- Naga-Phaneendra.Ghantasala_152681_phase2
- 行业文档-设计装置-一种平台升降装置.zip
