BLDC电机控制:6步调速与零交叉检测
需积分: 24 117 浏览量
更新于2024-07-15
1
收藏 1.18MB PPTX 举报
"Active semi PAC52XX BLDC Training.pptx"
无刷直流电机(BLDC)控制技术在现代电机驱动系统中占据了重要的位置。在本资料中,主要讨论了针对PAC52XX系列芯片的BLDC电机的方波(6步)控制方法以及其背后的原理。
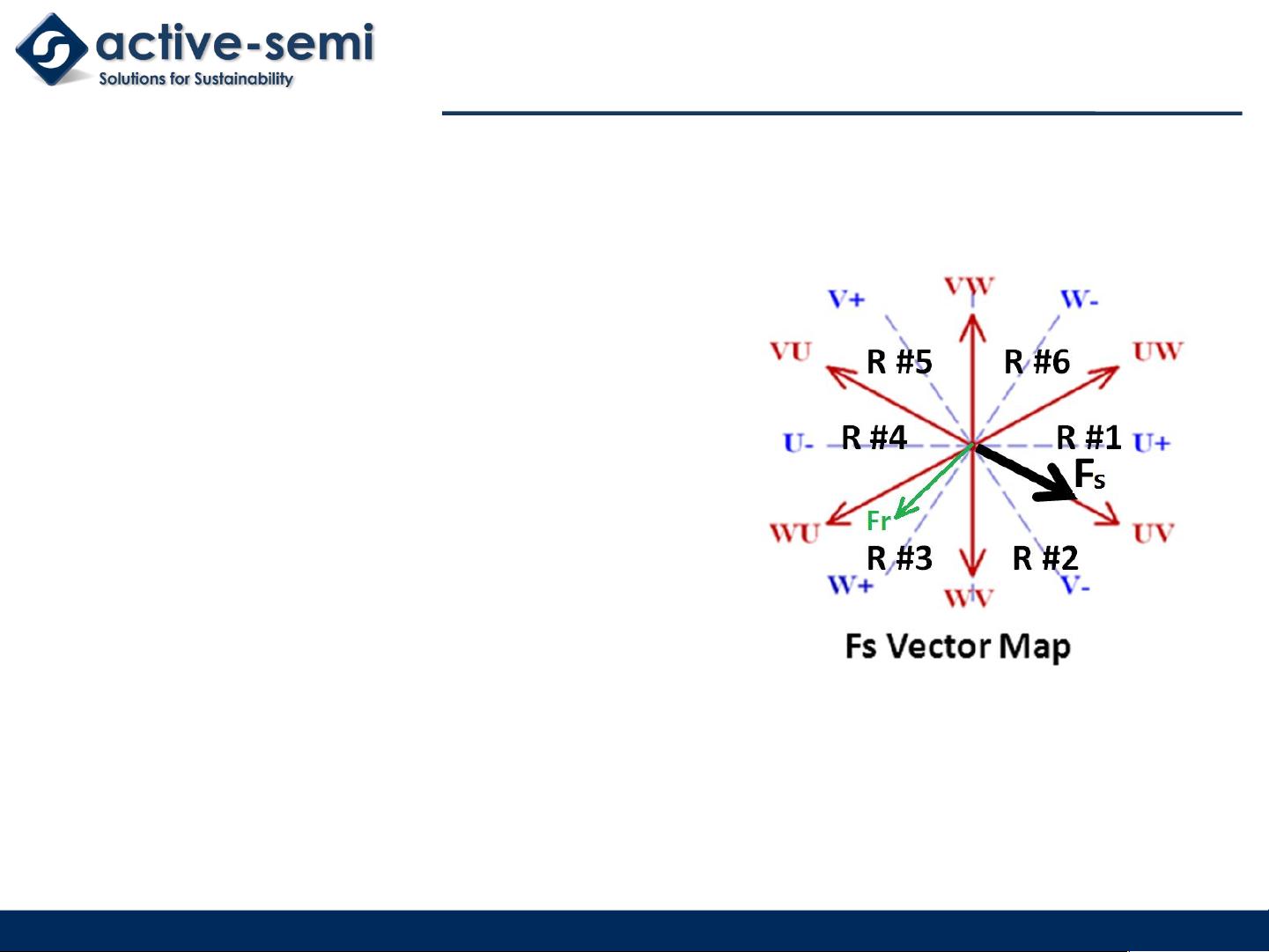
方波控制,也称为6步控制,是因为在一个电气周期内,电机的三相绕组会经历6种不同的开关状态。每一种开关状态都会产生一个向量扭矩力,推动电机旋转。这种控制方法涉及两个关键点:一是开关状态,它对应于电机转子的位置,可以通过霍尔传感器或反电动势(Back EMF)信号获取;二是PWM驱动器占空比,它可以调节扭矩力以驱动目标电机。
在BLDC电机的控制算法中,反电动势(Back EMF)起到了至关重要的作用。反电动势是在电机旋转时,由于电磁感应而产生的电压,可以反映电机的实时转速和位置。电机内部被划分为6个矢量区域,每个区域对应一个特定的电机状态,如从1(UV)到6(WV)。通过识别电机转子所在区域,我们可以相应地调整定子磁场(Fs),以使电机按所需方向旋转。
PAC52XX芯片内集成了零交叉检测电路,其中包含三个相位比较器,正相输入是AIO7、AIO8和AIO9,负相输入是这些输入的中心电压。比较器的输出连接到数字核心的PINPB7,用于检测相电压与中心电压之间的零交叉点。当发生零交叉时,输出信号会发生翻转,从而可以计算出电机的位置。
在实际应用中,我们需要根据电机当前所在的扇区选择正确的比较器通道,输出相应的比较结果。这使得我们能够持续跟踪电机的旋转,并精确控制电机的运行。
PAC52XX系列芯片提供的无刷直流电机控制方案结合了方波控制和反电动势算法,通过高效地处理霍尔传感器和反电动势信号,实现了对电机精确、高效的控制。这种技术对于实现无感启动和马达控制尤为关键,因为它能够确保在没有霍尔传感器的情况下也能准确感知电机的状态并进行控制。
CONFIDENTIAL – NDA REQUIRED
Back-emf Algorithm
•
# #3!%4 (+
12% #
!eld of stator (Fs) )* 5
# 6!7"8
5 12%
#Fs )- %
•
9 # 54%%%0/
#:64
剩余15页未读,继续阅读

anson20012
- 粉丝: 1
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
