点云分割深度解析:模型比较与数据集选择
需积分: 0 46 浏览量
更新于2024-07-14
收藏 4.03MB PPTX 举报
点云分割的学习是一项关键的深度学习技术,主要应用于三维空间中的物体识别和理解。本文档以点云分割为主题,探讨了两种主要的处理策略:基于二维多视图的方法和基于三维体素化的方案。
多视图语义分割通过将点云数据映射到二维空间,利用二维图像处理技术来处理点云。这种方法的优点在于能够利用成熟的二维算法和丰富的数据资源,适用于特定或小型场景,具有较高的实用性。然而,由于依赖于结构化数据,其在处理大规模和复杂场景时可能存在局限性,且空间复杂度较高,对存储和计算资源需求较大。
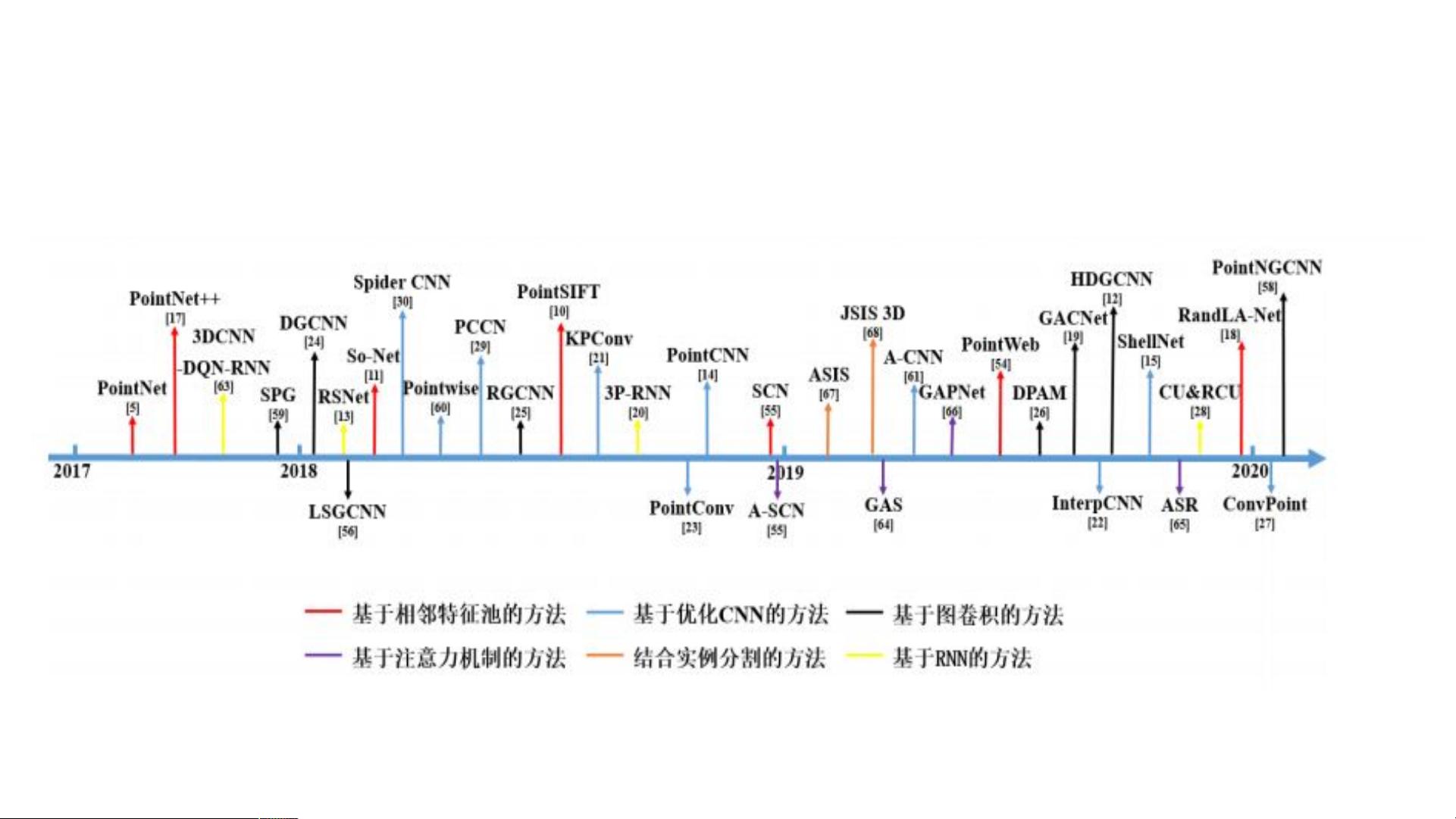
相比之下,直接点云分类和分割方法不涉及体素化或投影,而是直接从原始点云数据中提取特征,如PointNet、PointNet++、RandLNet、kpconv和RS-CNN等模型。这些模型关注点级语义,保留了原始点云的内在信息,减少了转换过程中的信息丢失,但同时对模型设计和局部特征捕捉提出了更高的要求。
在实际应用中,配置合适的模型环境是关键步骤,包括安装必要的深度学习框架(如TensorFlow或PyTorch)、GPU支持等。常用的训练和评估数据集包括:
1. ModelNet40:一个包含40个类别的人造CAD模型数据集,分为训练集和测试集,用于模型的预训练和性能测试。
2. ScanNet:1513个室内场景的点云数据,分为训练集和测试集,适合研究室内场景理解。
3. S3DIS:272个3D房间场景,用于研究大型室内区域的点云分割。
4. ShapeNet:超过200000个CAD模型的大型数据集,提供了丰富的类别层次结构。
5. Semantic3D:一个大规模标注的自然场景数据集,涵盖了多种城市环境,如建筑、道路等,适用于研究通用场景分割。
点云处理中,PointNet++作为PointNet的改进版,解决了PointNet的局限性,如缺乏局部上下文和对平移不变性的处理。PointNet++通过Sample Layer(采样点)、Grouping Layer(分组处理)和PointNet Layer(特征编码)等模块,实现了从局部到全局的特征提取,使其能够在分割任务中表现出强大的表现力。
总结来说,点云分割的学习涉及到深度学习模型的选择、数据集的准备与选择、模型环境配置以及性能评估等多个环节。直接点云处理方法虽然挑战性更大,但能够更好地保留原始信息,适用于更广泛的场景。而多视图方法则适合特定应用场景,两者各有优劣,根据具体需求进行选择和优化。
直接点云分类
剩余16页未读,继续阅读
2021-04-05 上传
2024-06-03 上传
2024-06-03 上传
2022-11-27 上传
2020-10-16 上传
2021-11-11 上传
2021-10-06 上传
2024-06-03 上传

LL_DW
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
