深度学习领域卷积神经网络全览:历史、模型进展与未来趋势
需积分: 50 22 浏览量
更新于2024-07-16
2
收藏 3.7MB PDF 举报
本文是一篇深度探讨卷积神经网络(Convolutional Neural Network, CNN)的21页全面综述论文。CNN作为深度学习领域的重要组成部分,在计算机视觉、自然语言处理等领域取得了显著成果,近年来吸引了产业界和学术界的广泛关注。作者在本研究中超越了现有的主要关注应用层面的文献,力求从更广阔的视角出发,提供新的理论见解和未来发展趋势。
论文首先回顾了CNN的历史,强调了其从早期概念到现代技术的演变过程,以及关键里程碑事件。通过对CNN历史的梳理,读者可以更好地理解这一领域的发展脉络和重要转折点。
接着,论文深入解析了CNN的基本原理和架构,包括滤波器的使用、特征检测和池化层的作用,以及权重共享等核心特性。这有助于读者掌握CNN的核心计算机制。
然后,文章详细介绍了经典和先进的CNN模型,重点突出了这些模型在达到当前最高性能时的关键设计元素和技术突破。这些模型分析涵盖了诸如ResNet、Inception、VGG等知名网络,以及它们在特定任务中的优化策略和改进方法。
通过实验分析,论文提出了一些关于模型选择和实践中的经验法则,帮助读者理解如何根据具体应用场景有效地调整和优化CNN。这包括如何平衡模型复杂度与性能,以及如何处理过拟合等问题。
文章进一步扩展到了一维、二维和多维卷积的讨论,展现了CNN在不同数据维度上的通用性和灵活性。例如,一维CNN在文本分类中的应用,二维CNN在图像识别中的应用,以及多维卷积在网络如3D医学影像分析中的应用。
最后,论文指出了CNN面临的挑战和未来的研究方向,包括但不限于网络效率、迁移学习、自适应卷积、对抗性攻击防御等议题。这些前沿话题为后续的研究者提供了宝贵的启示和潜在的研究课题。
这篇综述论文为读者提供了一个全面且深入的CNN框架,旨在帮助读者理解和应用这种强大的机器学习工具,同时也激发他们在该领域的创新思维。无论是初学者还是研究者,都能从中获取有价值的知识和洞见,推动该领域不断向前发展。
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
5
block are narrower than the middle. Using 1 × 1 convolution
kernel can not only reduce the number of parameters in the
network but also greatly improve the network's nonlinearity.
A lot of experiments in [37] have proved that ResNet can
mitigate the gradient vanishing problem without degeneration
in deep neural networks since the gradient can directly flow
through shortcut connections.
Based upon ResNet, many studies have managed to improve
the performance of the original ResNet, such as pre-activation
ResNet [38], wide ResNet [39], stochastic depth ResNets (SDR)
[40], and ResNet in ResNet (RiR) [41].
F. DCGAN
Generative Adversarial Network (GAN) [42] is an
unsupervised model proposed by Goodfellow et al. in 2014.
GAN contains a generative model G and a discriminative model
D. The model G with random noise z generates a sample G(z)
that subjects to the data distribution P
data
learned by G. The
model D can determine whether the input sample is real data x
or generated data G(z). Both G and D can be nonlinear functions,
such as deep neural networks. The aim of G is to generate data
as real as possible; nevertheless, the aim of D is to distinguish
the fake data generated by G from the real data. There exists an
interestingly adversarial relationship between the generative
network and the discriminative network. This idea originates
from game theory, in which the two sides use their strategies to
achieve the goal of winning. The procedure is shown in Fig. 10.
Radford et al. [43] proposed Deep Convolutional Generative
Adversarial Network (DCGAN) in 2015. The generator of
DCGAN on Large-scale Scene Understanding (LSUN) dataset
is implemented by using deep convolutional neural networks,
the structure of which is shown in the figure below.
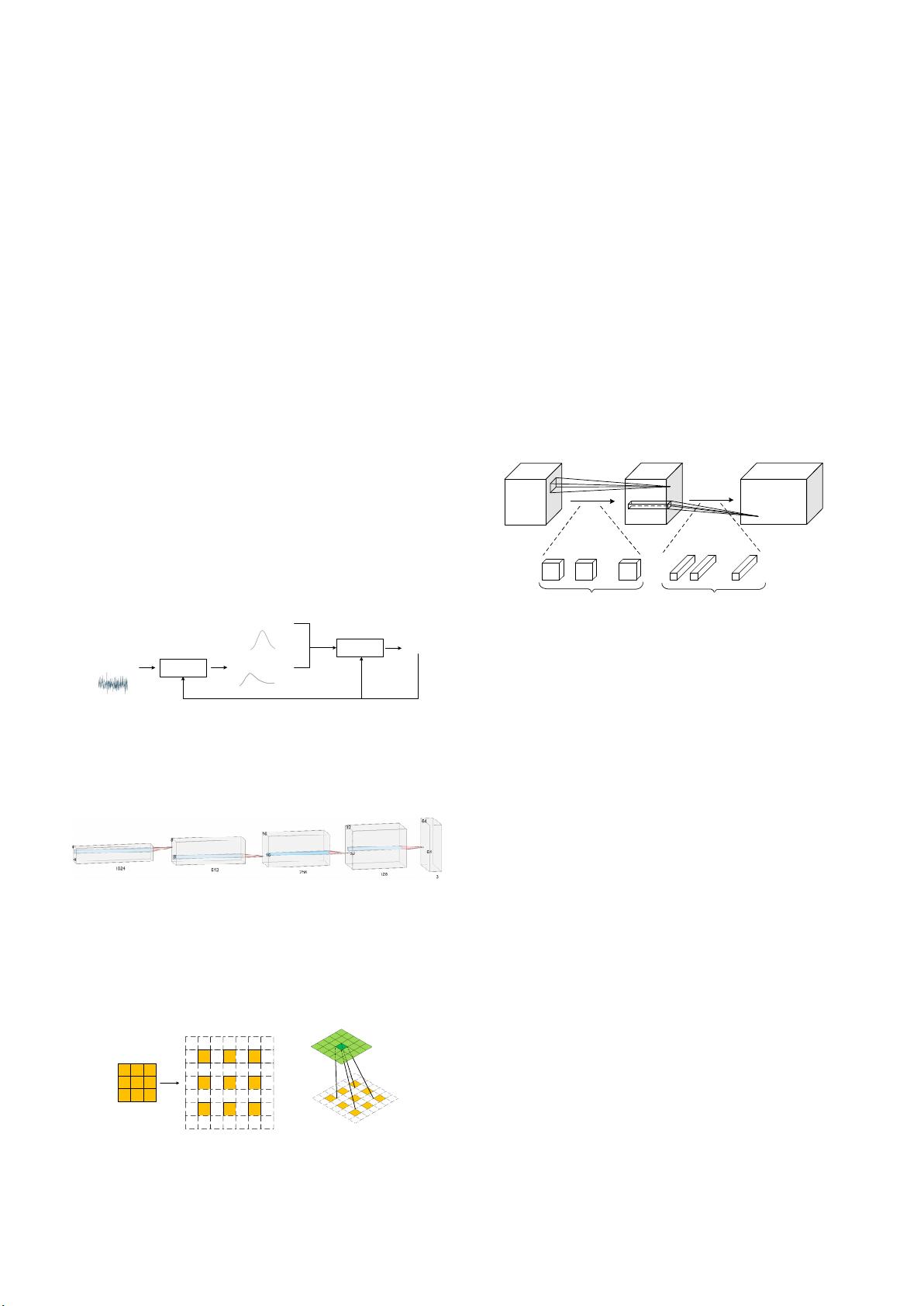
In Fig. 11, the generative model of DCGAN performs up-
sampling by "fractionally-strided convolution". As shown in
Fig. 12 (a), supposing that there is a 3 × 3 input, and the size of
the output is expected to be larger than 3 × 3, then the 3 × 3
input can be expanded by inserting zero between pixels. After
expanding to a 5 × 5 size, performing convolution, shown in
Fig. 12 (b), can obtain an output larger than 3 × 3.
G. MobileNets
MobileNets are a series of lightweight models proposed by
Google for embedded devices such as mobile phones. They use
depth-wise separable convolutions and several advanced
techniques to build thin deep neural networks. There are three
versions of MobileNets to date, namely MobileNet v1 [44],
MobileNet v2 [45], and MobileNet v3 [46].
1) MobileNet v1
MobileNet v1 [44] utilizes depth-wise separable convolutions
proposed in Xception [26], which decomposes the standard
convolution into depth-wise convolution and pointwise
convolution (1 × 1 convolution), as shown in Fig. 13.
Specifically, standard convolution applies each convolution
kernel to all the channels of input. In contrast, depth-wise
convolution applies each convolution kernel to only one
channel of input, and then 1 × 1 convolution is used to combine
the output of depth-wise convolution. This decomposition can
substantially reduce the number of parameters.
MobileNet v1 also introduces the width multiplier to reduce
the number of channels of each layer and the resolution
multiplier to lower the resolution of the input image (feature
map).
2) MobileNet v2
Based upon MobileNet v1, MobileNet v2 [45] mainly
introduces two improvements: inverted residual blocks and
linear bottleneck modules.
In Section 3.5, we have explained three-layer residual blocks,
the purpose of which is to make use of 1 × 1 convolution to
reduce the number of parameters involved in 3 × 3 convolution.
In a word, the whole process of a residual block is channel
compression—standard convolution—channel expansion. In
MobileNet v2, an inverted residual block (seen in Fig. 14 (b))
is opposite to a residual block (seen in Fig. 14 (a)). The input of
an inverted residual block is firstly convoluted by 1 × 1
convolution kernels for channel expansion, then convoluted by
3 × 3 depth-wise separable convolution, and finally convoluted
by 1 × 1 convolution kernels to compress the number of
channels back. Briefly speaking, the whole process of an
inverted residual block is channel expansion—depth-wise
separable convolution—channel compression. Also, due to the
fact that depth-wise separable convolution cannot change the
number of channels, which causes the number of input channels
limits the feature extraction, inverted residual blocks are
harnessed to handle the problem.
Generator
Discriminator
Real data x
Generated data G(z)Random noise z
Result [0, 1]
Update
Fig. 10. The flowchart of GAN
Fig. 11. DCGAN generator used for LSUN scene modeling
(a) (b)
Fig. 12. An example of fractionally-strided
convolution. (a) Inserting zero
between 3 × 3 kernel points. (b) Convolving the 7 × 7 graph
#M, d×d×1
#N, 1×1×M
d
d
1
M
1
d
d
1
...
M
M N
M
1
1
M
...
N
Fig. 13. Depth-
wise separable convolutions in MobileNet v1. #M and #N
represent the number of kernels of depth-wise convolution and po
intwise
convolution, respectively
剩余20页未读,继续阅读
3751 浏览量
157 浏览量
974 浏览量
2024-03-22 上传
288 浏览量
2021-07-11 上传
2021-09-01 上传

syp_net
- 粉丝: 158
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网狐工具:核心DLL和程序文件解析
- PortfolioCVphp - 展示JavaScript技能的个人作品集
- 手机归属地查询网站完整项目:HTML+PHP源码及数据集
- 昆仑通态MCGS通用版S7400父设备驱动包下载
- 手机QQ登录工具的压缩包内容解析
- Git基础学习仓库:掌握版本控制要点
- 3322动态域名更新器使用教程与下载
- iOS源码开发:温度转换应用简易教程
- 定制化用户登录页面模板设计指南
- SMAC电机在包装生产线应用的技术案例分析
- Silverlight 5实现COM组件调用无需OOB技术
- C#实现多功能画图板:画直线、矩形、圆等
- 深入探讨C#语言在WPF项目开发中的应用
- 新版2012109通用权限系统源码发布:多角色用户支持
- 计算机科学与工程系网站开发技术源码合集
- Java实现简易导出Excel工具的开发教程
