MATLAB仿真实验:PID控制算法参数整定与分析
版权申诉
"计算机控制课程设计---PID控制算法的MATLAB仿真研究"
这篇文档详细介绍了电气工程学院自动化专业的一次计算机控制课程设计,旨在通过MATLAB仿真深入理解PID控制算法。实验目的是巩固PID算法理论,掌握数字控制器实现,熟悉MATLAB在控制系统设计中的应用,以及提升程序设计能力。
实验中,学生需要模拟一个一阶惯性环节的被控对象,其传递函数包含参数K、τd和τs。PID控制算法的仿真研究包括四个方面:
1. 参数整定:采用各种方法(如ZN法、扩充临界比例度法等)确定PID参数,通过MATLAB仿真观察系统响应,评估控制效果。
2. 模型失配:改变对象模型参数,研究PID控制器在模型参数变化时的控制性能,探讨鲁棒性。
3. 非线性影响:分析执行机构非线性(如饱和、死区非线性)如何影响控制效果。
4. 扰动响应:在系统稳定后施加扰动信号,分析不同信号类型和作用位置对系统稳定性的影响。
在参数整定过程中,首先选择了采样周期Ts=1s,然后通过调节比例系数Kp,找到临界比例度δk,接着根据控制度Q计算其他参数。通过调整参数,如减小采样周期、增大积分时间常数,改善系统暂态性能。最后,选择了Ts=1s,PID参数为Kp=0.25,Ki=0.001,Kd=3,得到较好的控制效果。
模型失配分析中,当比例系数增大5%时,系统性能有所下降,但仍然保持稳定。
整个课程设计通过MATLAB的Simulink工具箱进行,让学生亲身体验PID控制器的设计与优化,以及在面对系统不确定性时的适应性调整,增强了实践操作技能。
析对不同的扰动信号类型(如脉冲信号、阶跃)和不同的信号作用位置(如在系
统的测量输出端或控制器输出后位置)情况下,系统是否仍然稳定,并与无扰动
情况下的响应曲线进行比较。
2.相关理论知识
1)PID 算法原理
2)PID 控制器调节参数的整定方法
3)MATLAB 中动态仿真工具箱 Simulink 的使用
3. 内容及步骤
1 ) 首 先 选 择 一 种 PID 控 制 器 调 节 参 数 的 整 定 方 法 , 得 到 最 优 调 节 参 数
, ,
P I D
K K K
;
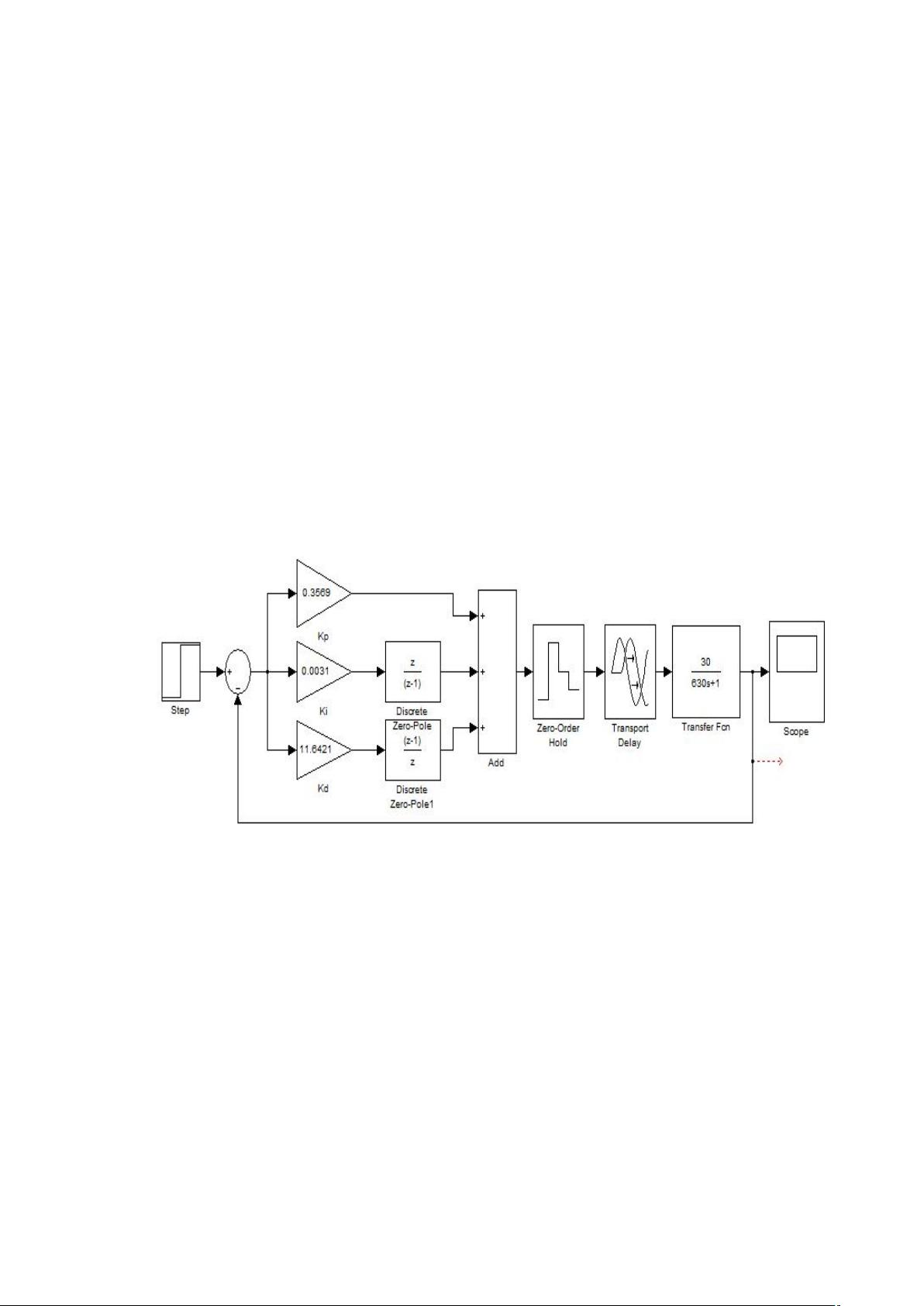
2)打开 MATLAB,启动 SIMULINK 工具箱,创建一个如下图所示仿真控制系统;
观察系统阶跃响应曲线,记录动态特性指标值。
图 1
3)分别修改参数
K
、
f
T
和
d
t
值(不超过原值的
5%±
),观察记录系统出现模型
失配时控制效果的改变,分析原因;
4)仿真验证执行机构非线性的作用验证分析;
5)
PID
控制对系统扰动信号的控制效果验证分析。
四、具体做法
1、参数整定
1)选择采样周期 由于被控对象中含有纯滞后环节,且其滞后时间常数τ
d
=60
剩余10页未读,继续阅读
2022-05-30 上传
2022-07-02 上传
2024-02-07 上传
2022-05-29 上传
2020-01-19 上传
2023-03-01 上传
2023-02-20 上传
2022-10-30 上传
2022-07-03 上传

小虾仁芜湖
- 粉丝: 113
- 资源: 9354
 我的内容管理
展开
我的内容管理
展开







最新资源
- react-mobx-sample:React Mobx示例应用程序
- 行业分类-设备装置-航天器姿态控制系统的间歇性故障容错分析方法.zip
- Timer
- booInvestments.github.io:CS 422 Stratton Oakmont网站
- new1
- Clean WeChat X.exe
- Project3
- MM32SPIN0x(q) 库函数和例程.rar
- tuneout:一个 Apple 脚本,用于将 iTunes 歌曲和艺术家信息写入文本文件,以便与 OBS 流媒体软件的“文件中的文本”功能一起使用。 TuneOut 和 OBS 一起使用,将在流期间显示 iTunes 正在播放的信息
- NASS-SBoH-2021-1-client-server:客户端服务器
- 套接字服务器
- G2M-insight-for-Cab-Investment-firm-
- money-back-guarantee-contract
- 行业分类-设备装置-航天光学遥感器在轨连续调焦的闭环动态仿真测试方法.zip
- Python库 | sqlalchemy_drill-0.2.1.dev0-py3-none-any.whl
- java版商城源码-mgmsmartcity:管理智慧城市
