深度解析:ToF技术与结构光的辨析与优势
ToF技术和结构光是两种常见的深度感知技术,在AR(增强现实)和VR(虚拟现实)等领域发挥着关键作用。它们的主要区别在于工作原理和应用场景。
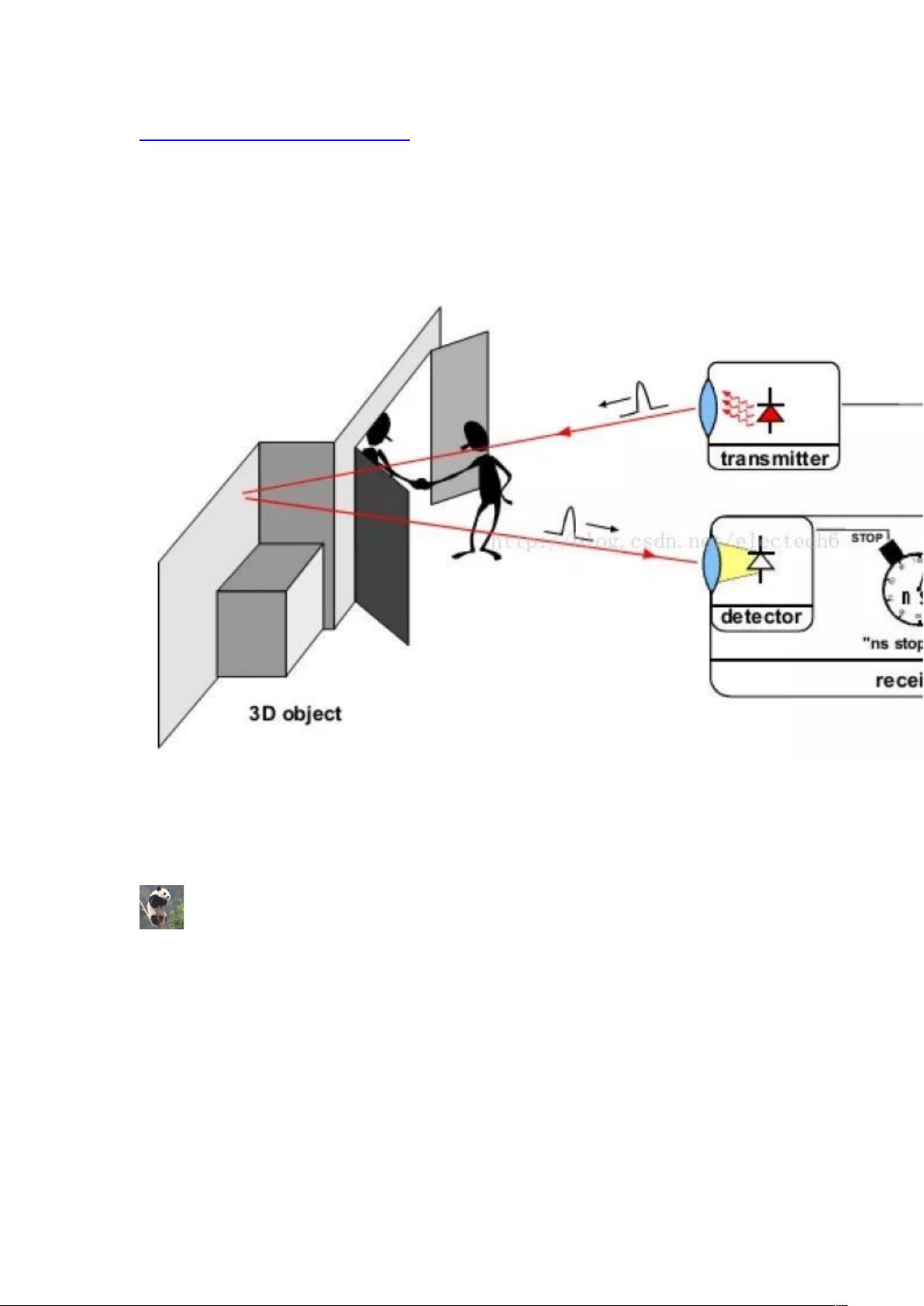
ToF,全称为飞行时间(Time-of-Flight,简称ToF),利用光的飞行时间来测量物体距离。它的工作原理是发射器发出调制的光脉冲,光脉冲碰到物体后反射回接收器,通过测量光的往返时间,计算出物体与相机的距离。这种技术要求高精度的测量设备,特别是对于时间的捕捉。早期的ToF技术受限于体积大、成本高,主要应用于工业环境。然而,随着集成电路和传感器技术的发展,尤其是CMOS芯片上的相位测量技术的进步,现代ToF模块已经实现了小型化和成本降低,例如IRSZ238XC这款小而高效的模块,尺寸仅为12mm×8mm,分辨率高达38,000像素。
相比之下,结构光(Structured Light)则是通过发射一组具有特定结构的光模式,如条纹或网格,然后分析物体表面接收到的光的变形或缺失,以此重建物体的三维信息。结构光系统通常包括一个光源、一个投影仪和一个摄像头,通过对比投射到物体上的光图案和接收的图像差异,推断出物体的形状和位置。结构光技术常用于精密工业检测和消费级设备,如智能手机的3D面部识别功能,因为它能够提供高质量的深度信息,且对硬件集成度要求相对较低。
两者的区别在于:
1. **测量方法**:ToF基于光的时间差,而结构光基于光的几何变形。
2. **精度和成本**:ToF早期受限于体积和成本,但现在通过集成化得以改善;结构光则通常提供较高的实时性能,但可能在精度上稍逊于ToF。
3. **应用场合**:ToF适合需要高精度且经常使用的场景,如AR眼镜;结构光因其成本效益和易用性,在消费级设备中更为常见。
在AR眼镜中,ToF因其小型化、高精度和低功耗的特点,成为了一种理想的深度感知技术,支持AR眼镜在各种环境下的稳定定位和建图。而结构光虽然也在AR中有所应用,但在技术成熟度和市场推广上可能不如ToF全面。两者各有优劣,共同推动了AR和VR技术的发展。
下载后可阅读完整内容,剩余9页未读,立即下载
2020-05-09 上传
2024-08-23 上传
2022-11-23 上传
2023-08-05 上传
2021-10-26 上传
2021-10-26 上传
2022-06-16 上传
2022-06-16 上传
2022-11-24 上传

金
- 粉丝: 3
- 资源: 29
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
