生物启发的视觉场景识别框架:模板匹配与最大池化结合
需积分: 12 41 浏览量
更新于2024-07-31
收藏 3.49MB PDF 举报
"Robust Object Recognition with Cortex-Like Mechanisms"是一篇深入探讨生物启发式计算机视觉方法的论文。作者Thomas Serre、Lior Wolf、Stanley Bileschi、Maximilian Riesenhuber和Tomaso Poggio(IEEE会员)提出了一种新的物体识别框架,灵感来源于大脑视觉皮层的结构。他们设计了一个层次化的系统,该系统模仿了视觉皮层的组织,通过交替运用模板匹配和最大池化操作,构建出复杂且不变性的特征表示。
在这个框架中,系统首先进行模板匹配,通过检测场景中的特定模式或对象来定位和识别。然后,通过最大池化操作,系统能够处理尺度变化、旋转和部分遮挡等变异性问题,提高了对复杂视觉场景的理解能力。这种机制使得模型能够在单个物体识别、混杂环境下的目标检测,以及涉及形状和纹理的多类分类任务中展现出强大的性能。
值得注意的是,这个生物约束驱动的方法具有从少量训练样本中学习的能力,这在数据稀缺的情况下尤为关键。它在与当时最先进的系统竞争中表现出令人惊讶的效果,证明了其在实际应用中的有效性。论文还探讨了存在一个通用且冗余的特征字典的可能性,这个字典可以处理大多数物体类别,进一步扩展了模型的泛化能力。
"Robust Object Recognition with Cortex-Like Mechanisms"为计算机视觉领域提供了一个新的视角,展示了如何通过模拟人脑处理视觉信息的方式,实现更加鲁棒和高效的物体识别。这篇研究不仅提升了人工智能在复杂场景中的表现,也为我们理解生物智能和机器学习之间的联系提供了有价值的洞察。
only the maximum value from the two maps. Note that
C
1
responses are not computed at every possible locations
and that C
1
units only overlap by an amount
S
. This makes
the computations at the next stage more efficient. Again,
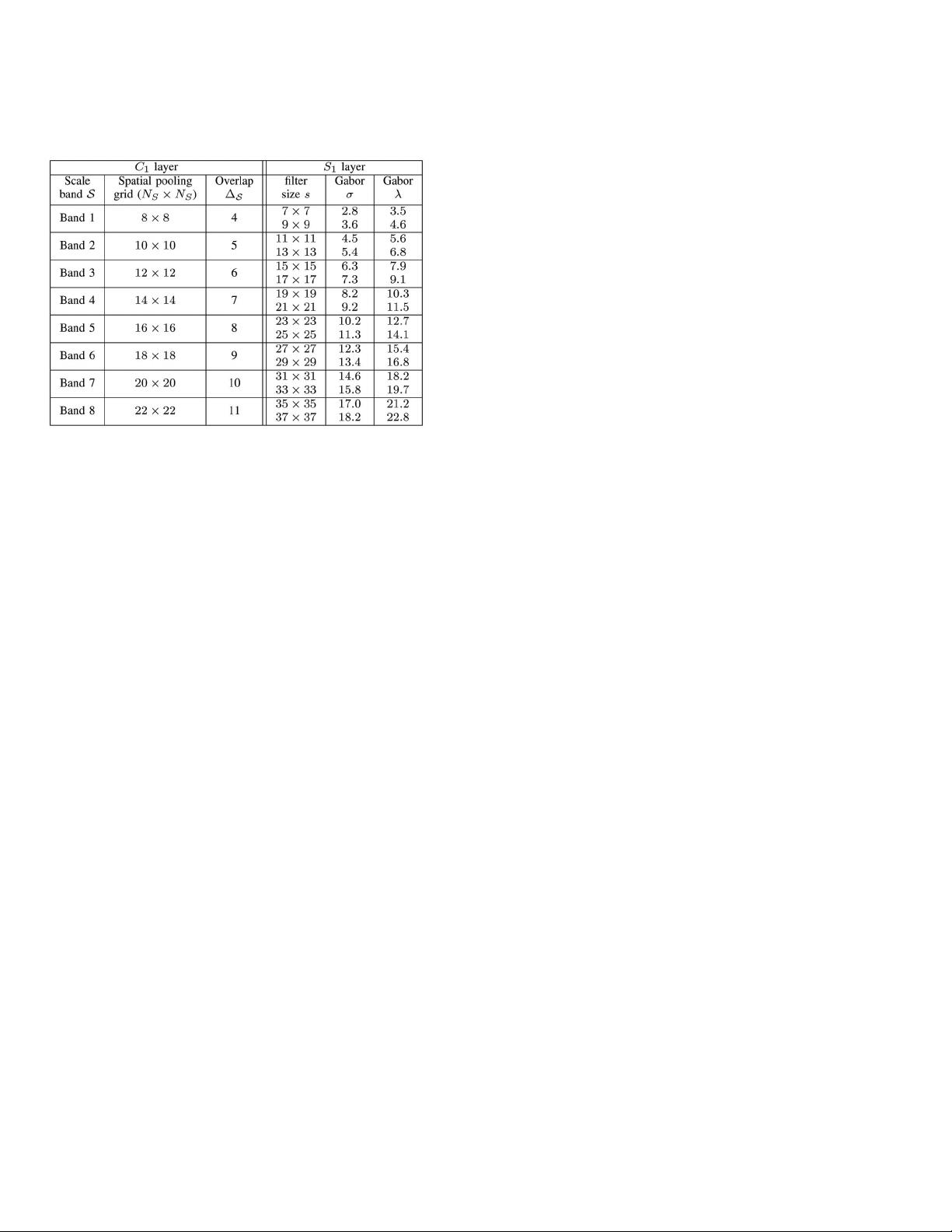
parameters (see Table 1) governing this pooling operation
were adjusted such that the tuning of the C
1
units match the
tuning of complex cells as measured experimentally (see [41]
for details).
S
2
units: In the S
2
layer, units pool over afferent C
1
units
from a local spatial neighborhood across all four orienta-
tions. S
2
units behave as radial basis function ( RBF) units.
2
Each S
2
unit response depends in a Gaussian-like way on
the Euclidean distance between a new input and a stored
prototype. That is, for an image patch X from the previous
C
1
layer at a particular scale S, the response r of the
corresponding S
2
unit is given by:
r ¼ exp kX P
i
k
2
; ð4Þ
where defines the sharpness of the
TUNING and P
i
is one
of the N features (center of the
RBF units) learned during
training (see below). At runtime, S
2
maps are computed
across all positions for each of the eight scale bands. One
such multiple scale map is computed for each one of the
ðN 1; 000Þ prototypes P
i
.
C
2
units: Our final set of shift- and scale-invariant C
2
responses is computed by taking a global maximum ((3))
over all scales and positions for each S
2
type over the entire
S
2
lattice, i.e., the S
2
measures the match between a stored
prototype P
i
and the input image at every position and
scale; we only keep the value of the best match and discard
the rest. The result is a vector of NC
2
values, where N
corresponds to the number of prototypes extracted during
the learning stage.
The learning stage: The learning process corresponds to
selecting a set of N prototypes P
i
(or features) for the S
2
units.
This is done using a simple sampling process such that,
during training, a large pool of prototypes of various sizes
and at random positions are extracted from a target set of
images. These prototypes are extracted at the level of the C
1
layer across all four orientations, i.e., a patch P
o
of size n n
contains n n 4 elements. In the following, we extracted
patches of four different sizes ðn ¼ 4; 8 ; 12; 16Þ. An important
question for both neuroscience and computer vision regards
the choice of the unlabeled target set from which to learn—in
an unsupervised way—this vocabulary of visual features. In
the following, features are learned from the positive training
set for each object independently, but, in Section 3.1.2, we
show how a universal dictionary of features can be learned
from a random set of natural images and shared between
multiple object classes.
The Classification Stage: At runtime, each image is propa-
gated through the architecture described in Fig. 1. The C
1
and
C
2
standard model features (SMFs) are then extracted and
further passed to a simple linear classifier (we experimented
with both
SVM and boosting).
3EMPIRICAL EVALUATION
We evaluate the performance of the SMFs in several object
detection tasks. In Section 3.1, we show results for detection in
clutter (sometimes referred to as weakly supervised) for
which the target object in both the training and test sets
appears at variable scales and positions within an unseg-
mented image, such as in the CalTech101 object database [21].
For such applications, because 1) the size of the image to be
classified may vary and 2) because of the large variations in
appearance, we use the scale and position-invariant C
2
SMFs
(the number N of which is independent of the image size and
only depends on the number of prototypes learned during
training) that we pass to a linear classifier trained to perform a
simple object present/absent recognition task.
In Section 3.2, we evaluate the performance of the SMFs in
conjunction with a windowing approach. That is, we extract a
large number of fixed-size image windows from an input
image at various scales and positions, which each have to be
classified for a target object to be presentor absent. In this task,
the target object in both the training and test images exhibits a
limited variability to scale and position (lighting and within-
class appearance variability remain) which is accounted for
by the scanning process. For this task, the presence of clutter
within each image window to be classified is also limited.
Because the size of the image windows is fixed, both C
1
and
C
2
SMFs can be used for classification. We show that, for such
an application, due to the limited variability of the target
object in positionand scale and the absence of clutter, C
1
SMFs
appear quite competitive.
In Section 3.3, we show results using the SMFs for the
recognition of texture-based objects like trees and roads. For
this application, the performance of the SMFs is evaluated at
every pixel locations from images containing the target
object which is appropriate for detecting amorphous objects
in a scene, where drawing a closely cropped bounding box
is often impossible. For this task, the C
2
SMFs outperform
the C
1
SMFs.
3.1 Object Recognition in Clutter
Because of their invariance to scale and position, the
C
2
SMFs can be used for weakly supervised learning tasks
for which a labeled training set is available but for which the
training set is not normalized or segmented. That is, the
target object is presented in clutter and may undergo large
414 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 3, MARCH 2007
TABLE 1
Summary of the S
1
and C
1
SMFs Parameters
2. This is consistent with well-known response properties of neurons in
primate inferotemp oral cortex and seems to be the key property for learning
to generalize in the visual and motor systems [42].
剩余15页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
337 浏览量
122 浏览量
272 浏览量
258 浏览量
382 浏览量
152 浏览量

ly334846035
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
