越野履带车辆动态模拟的详细多体模型
需积分: 3 83 浏览量
更新于2024-09-14
收藏 343KB PDF 举报
"这篇文档是关于使用DADS (Dynamic Analysis and Design System) 仿真软件创建一个详尽的多体模型,用于模拟越野履带车辆动态行为的研究。作者D.Rubinstein和R.Hitron分别来自以色列的Technion Research & Development Foundation 和 Technion – Israel Institute of Technology。该模型旨在克服传统模型在描述履带、悬挂系统以及它们与地面交互时的局限性,利用现代计算机技术实现更复杂的动态模拟。"
正文:
在当前的越野履带车辆动力学模拟模型中,通常采用超级元素来简化对履带和悬挂系统的描述。这样的模型无法充分考虑履带的动态特性、每个履带链节与地面之间的相互作用以及这些因素对车辆整体动力学性能的影响。随着计算速度的迅速提升,现在可以利用包含大量实体和力元素的更复杂模型。
研究者们开发了一个三维多体仿真模型,该模型利用LMS-DADS(动态分析和设计系统)软件,专注于模拟越野履带车辆的动态行为。这个模型的核心特征在于它包含了对履带、悬挂系统及其组件间动态交互的详细描述。模型的主体部分包括车架、摇臂等关键部件。
在模型中,履带被详细地建模,考虑了其与每个链节和地面的接触动态,这使得能够精确分析车辆在不平整地形下的行驶性能。悬挂系统的设计则考虑了其对车辆稳定性、操控性和舒适性的影响,尤其是在复杂地形条件下的表现。此外,模型还考虑了车轮与车架之间的相互作用,这对于理解车辆的整体动力响应至关重要。
通过这样的详尽模型,研究人员能够对越野履带车辆的动力学特性进行深入分析,包括但不限于车辆的牵引力、操控稳定性、振动分析以及地形适应性。这不仅有助于优化车辆设计,还能为驾驶员培训和设备维护提供数据支持。
DADS仿真文献提出的这个多体模型对于越野履带车辆的动态性能研究具有里程碑意义,它开启了更精确、更全面的车辆动力学模拟新时代,为未来的车辆设计和工程实践提供了强大的工具。
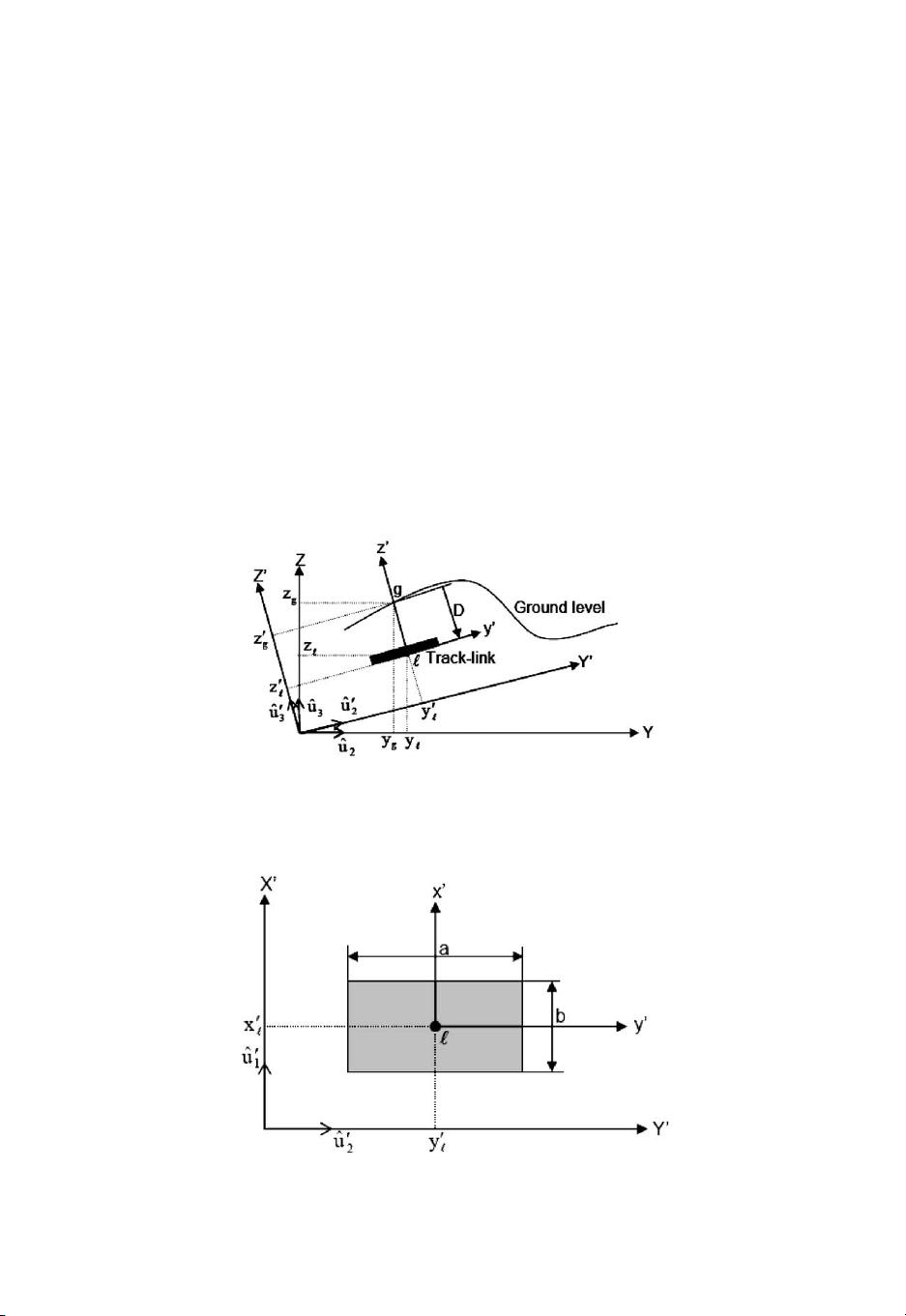
with a sinking link is presented in Fig. 1. A view of the link and its coordinate
systems from above is shown in Fig. 2.
In these figures:
^
u
1
;
^
u
2
;
^
u
3
¼ unit vectors of the X ; Y ; Z axes directions, respectively
^
u
0
1
;
^
u
0
2
;
^
u
0
3
¼ unit vectors of the X
0
; Y
0
; Z
0
axes directions, respectively
‘ ¼ origin of the x
0
y
0
z
0
coordinate system
g ¼ point at which the z
0
-axis passes through ground-surface level
x
‘
; y
‘
; z
‘
¼ location of point ‘ in the XYZ coordinate system
x
0
‘
; y
0
‘
; z
0
‘
¼ location of point ‘ in the X
0
Y
0
Z
0
coordinate system
x
g
; y
g
; z
g
¼ location of point g in the XYZ coordinate system
x
0
g
; y
0
g
; z
0
g
¼ location of point g in X
0
Y
0
Z
0
coordinate system
a ¼ link length
b ¼ track width
D ¼ sinkage of the track link in z
0
-direction.
Fig. 2. View of the link and its coordinate systems from above.
Fig. 1. Two-dimensional description of a track-link sinkage.
D. Rubinstein, R. Hitron / Journal of Terramechanics 41 (2004) 163–173 165
剩余10页未读,继续阅读
2018-06-24 上传
2021-05-06 上传
2021-04-28 上传
2021-04-28 上传
2024-06-25 上传
2024-09-05 上传
2021-05-28 上传
matlab-autonomous-vehicles:Matlab-autonomous-vehicles-simulation有关更多项目的访问,请访问:www.yawot.com-matlab开发
2021-05-29 上传
2021-02-08 上传
2020-01-30 上传

lililikekeke
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
