BP神经网络驱动的自适应PID控制仿真:原理与MATLAB实现
本资源主要探讨的是基于BP神经网络的自整定PID控制仿真技术,旨在提升工业控制系统的适应性和优化性能。首先,学习目标包括理解神经网络的基本特征、结构,特别是BP网络的学习算法,以及掌握如何将神经网络与PID控制相结合,实现参数的自动调整。
在工业控制领域,PID控制器由于其结构简单、控制效果优良而广泛使用,但存在对对象参数变化不敏感的问题。为了增强控制器的自适应性,研究者提出了将神经网络与PID结合的方法,利用神经网络的自学习能力来动态调整PID参数。BP神经网络作为核心组件,其结构通常采用4-5-3型,输入层接收反映系统运行状态的特征信号,输出层则对应PID控制器的三个可调参数,如比例(Kp)、积分(Ki)和微分(Kd)。
被控对象被假设为非线性的时变系统,其数学模型包含慢变系数和动态项。为了保证控制器的动态跟踪性能,选择合适的输入特征,例如对象的状态变化率。神经网络的学习过程分为正向传播和反向传播,通过比较实际输出与期望输出的误差,调整网络权重以最小化误差。
性能指标的选择对于优化控制器至关重要,通常选择如超调量、调节时间等指标,用矩阵形式表示为R(s)。在增量式数字PID算法中,权系数的调整采用梯度下降法,这种方法依据梯度的定义,即指向因变量增长最快的方向进行反向调整,以减小指定性能指标。
本研究通过MATLAB仿真软件实现BP神经网络PID控制器的设计与优化,其目的是为了提高控制系统的响应速度和稳定性,同时降低对外界环境变化的依赖,提升工业控制系统的整体性能。通过这个仿真项目,学习者能够深入理解神经网络在PID控制中的应用,并掌握如何通过数值计算和算法优化来实现自适应控制策略。
网络权系数的修正采用梯度下降法。
根据相关数学知识,针对指定因变量的梯度代表了使因变量增速最大的自变量变化方向,故而其反
方向代表了因变量下降最快的自变量变化方向,如果我们选取性能指标 为因变量,网络各层权系数
为自变量,则对应梯度的负方向就是权系数调整的最佳方向,因此,实际上构成了一个有目标的搜索算
法,对最终结果的收敛性提供了有力的保证。
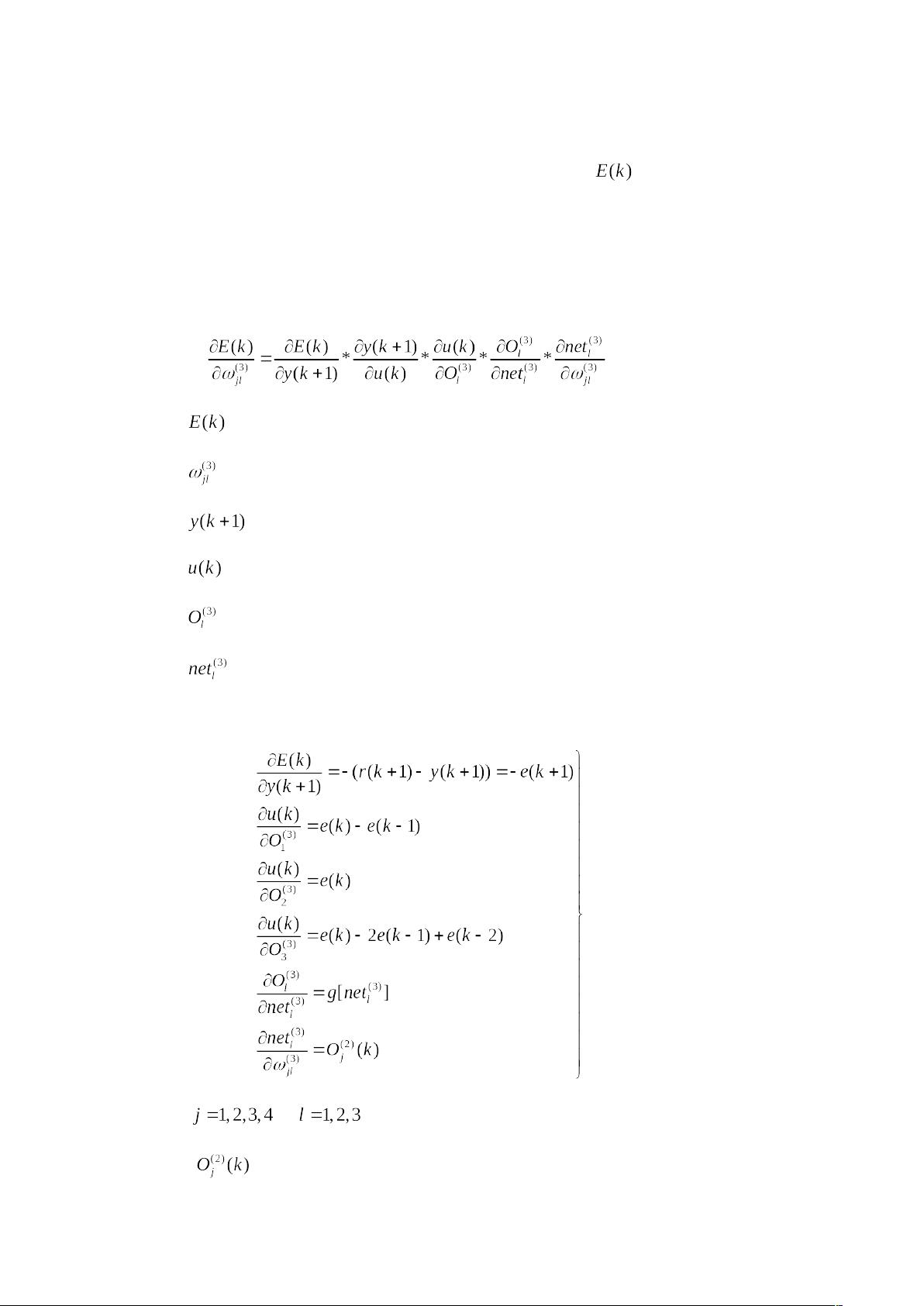
对应于本题采用的 4-5-3 型的 BP 网络,梯度负方向的计算:
(1) 隐含层-输出层:
其中: 为指标函数
为隐含层-输出层权系数矩阵元素
为被控对象输出
为 PID 控制器输出
为输出层输出
为输出层输入
根据所选用神经网络的数学模型,易知:
其中:
为隐含层输出,
剩余11页未读,继续阅读
2022-07-17 上传
2022-06-20 上传
2022-05-10 上传
2022-01-26 上传
2023-06-20 上传
2021-09-28 上传

weixin_39368839
- 粉丝: 0
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- 测试的基本概念,介绍基本概念,适合初学者
- Geodatabase 9.2 的数据复制技术PPT .pdf
- Visual C++ MFC 简明教程
- Simulink 建模与仿真
- Div+CSS布局大全珍藏
- Prentice.Hall.Computer.graphics.C.Version.pdf
- 一维数组类模板的设计与实现
- spring详细解说
- Prentice.Hall.Bruce.Eckel.Thinking.In.C++,.Second.Edition.Volume.2.Standard.Libraries.&.Advanced.Topics.pdf
- ARM JTAG 调试原理
- Prentice.Hall.Bruce.Eckel.Thinking.In.C++,.Second.Edition.Volume.1.pdf
- Prentice.Hall.Brian.W.Kernighan.and.Dennis.M.Ritchie.The.C.Programming.Language.2Nd.Ed.pdf
- John.Lions-Lions#39;.Commentary.on.UNIX.6th.Edition.with.Source.Code.pdf
- Inside.The.C++.Object.Model.pdf
- 两步学会JavaSocket编程
- 谭浩强版 C语言 pdf格式
